
Заход на посадку с рубежа начала снижения
Добавил пользователь Cypher Обновлено: 15.09.2024
Способы размыкания при заходе на посадку с рубежа начала снижения (РНС) зависят от направления подхода группы к аэродрому. При этом задача размыкания сводится к тому, чтобы обеспечить выход каждого самолета в расчетную точку (РТ) через безопасный временной интервал.
По сравнению с рассмотренными способами роспуска группы в районе аэродрома размыкание на рубеже начала снижения имеет ряд особенностей, основными из которых следует считать следующие. Во-первых, маневр захода на посадку для каждого самолета группы может быть различным, так как нет необходимости выходить в одну и ту же точку начала снижения. Поэтому траектории полета самолетов в расчетную точку могут быть разными. Во-вторых, точка начала роспуска может находиться на большом удалении от аэродрома, а потому выход в нее будет производиться с большими ошибками по месту и времени. Поэтому для обеспечения безопасности при пробивании облаков необходимо увеличивать безопасную дистанцию между самолетами с учетом ошибок выполнения маневра.
Рассмотрим методику выполнения основных способов размыкания на рубеже начала снижения.
Если группа выходит в район аэродрома с направления, которое примерно совпадает с рубежом начала снижения (рис. 5.20), то размыкание в этом случае производится путем последовательных разворотов самолетов на соответствующие курсы через выдержку времени (tвыд). Точка начала разворота первого самолета выбирается таким образом, чтобы угол разворота был около 90°.
Выдержка времени будет определяться соотношением
При следовании самолетов в рассредоточенном боевом порядке на временных дистанциях Δtбп выдержка времени для любого ведомого, если она определяется относительно
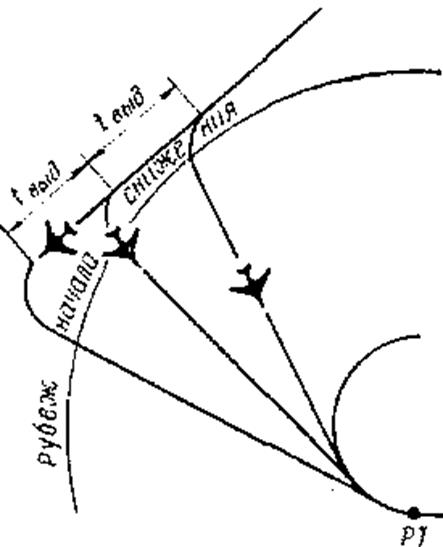
Рис. 9. К вопросу о роспуске группы на рубеже начала снижения (РНС).
ведущего, может быть рассчитана по формуле
где i— порядковый номер самолета, совершающего посадку, относительно ведущего.
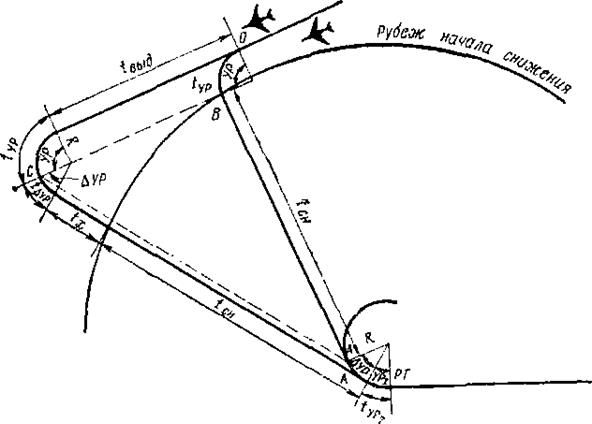
Рис. 10. К расчету времени выдержки при роспуске группы на РНС
Величина угла ΔУР зависит от высоты выхода в район аэродрома и количества самолетов в группе. Поэтому, если выполняется роспуск большой группы и высота роспуска большая, а посадка должна быть организована в минимальное время, расчет tвыд следует выполнять по формуле
При заходе на посадку и роспуске малых групп расчет выдержки времени следует производить по формулам:
Общая продолжительность роспуска и посадки для этого случая пределяется из соотношения
где tсн1, tсн2 —продолжительность снижения на прямолинейных участках;
typ 2 — продолжительность разворота на посадочный курс.
Если между самолетами была исходная дистанция боевого порядка Δtбп, то выдержка времени должна быть на эту величину меньше рассчитанной, т. е.
Для конкретных условий посадки, когда известны безопасный интервал Δtбез, время разворота на 180° на высоте выполнения маневра и другие данные, время выдержки может рассчитываться с помощью заранее составленных графиков. Образец такого графика приведен на рис. 12. Порядок определения УР (при tвыд=0) или tвыд (при УР=90°) по графику показан на, рис. 12.
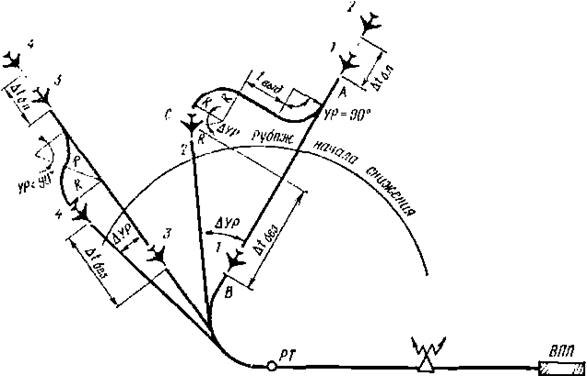
При подходе к рубежу начала снижения групп, состоящих из большого числа самолетов (6—12), размыкание их выполняется на петле вдоль маршрута полета к аэродрому (рис. 13) или отворотом от маршрута на заданный угол (рис. 14). В первом случае размыкание не отличается от роспуска группы на петле в районе аэродрома. Головной самолет после выхода в точку начала размыкания следует в расчетную точку, а все остальные разворачиваются на 180° и следуют вдоль петли в течение выдержки времени (tвыд), которая рассчитывается по формуле:
Второй самолет, как правило, не имеет выдержки времени и выполняет разворот сразу на 360°. Поэтому безопасный временной интервал посадки между первым и вторым самолетом будет равен Δtбез. Недостатком этого способа является расход топлива на размыкание группы без приближения к аэродрому.
Размыкание группы отворотом от маршрута на заданный угол позволяет вместе с размыканием обеспечить продвижение по маршруту полета к аэродрому.
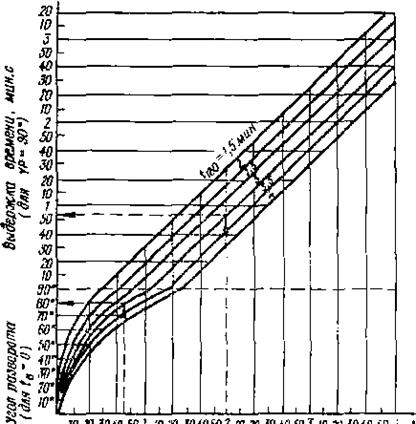
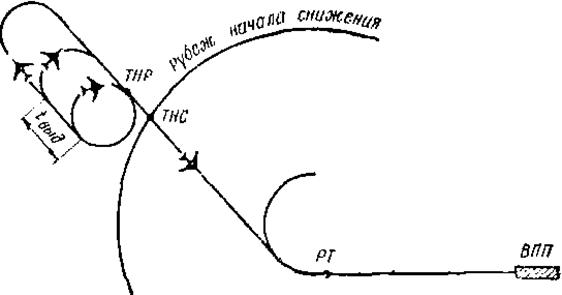
Рис. 13. Размыкание на петле, расположенной на РНС вдоль маршрута подхода к аэродрому
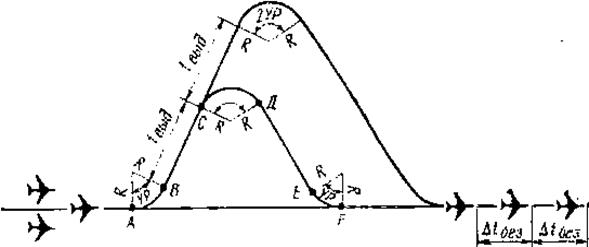
Рис.14. Размыкание на Δtбез отворотом от маршрута
Если для размыкания брать углы 45° или 60°, то формула (5) будет иметь вид
Расчеты по этим формулам могут быть сведены в таблицы или графики, которые используются в полете.
Выдержка времени для любого самолета боевого порядка относительно ведущего (головного) может быть рассчитана по формулам:
Отворот от маршрута при размыкании рассредоточенных боевых порядков должен выполняться всеми самолетами последовательно в одной точке маршрута. Это создает дополнительные трудности. Поэтому в тех случаях, когда нельзя точно определить момент выхода в точку начала маневра, следует для размыкания группы производить одновременный отворот от маршрута. В этом случае выдержка времени рассчитывается по тем же формулам.
Участок маневра выбирается заранее, а его начало обозначается характерным ориентиром (радионавигационной точкой).
Наличие на борту самолета технических средств, позволяющих определять место самолета с высокой точностью, значительно расширяет возможности по применению различных способов размыкания и захода на посадку.
Заключительным этапом любого полета является заход на посадку и посадка, которые с точки зрения безопасности считаются наиболее сложными и ответственными. Сложность обусловлена тем, что пилотирование ВС ведется в условиях значительного изменения высоты, скорости полета и частых разворотов, а также высокими требованиями к выдерживанию заданного маневра снижения и захода на посадку. Поскольку с повышением регулярности полетов экипажам ВС все чаще приходится выполнять заход на посадку в сложных метеоусловиях, принимаются меры по оборудованию аэродромов современными системами посадки. На ВС устанавливают специальное оборудование, позволяющее выполнять полуавтоматический и автоматический заход на посадку. Это требует от летного состава умения выполнять заход на посадку по приборам. Для поддержания требуемого уровня профессиональной подготовки пилоты систематически проходят тренировки на тренажерах, а также в реальных сложных погодных условиях.
Посадка ВС на аэродроме производится на ВПП , имеющую как правило два направления захода на посадку. Обычно посадку выполняют при встречном и встречно-боковом ветре. При этом для каждого типа ВС боковая составляющая ветра не должна превышать предельного значения, указанного в РЛЭ .
Курс, соответствующий рабочему направлению ВПП , называется посадочным . Заход на посадку выполняют по установленной для данного аэродрома схеме. Заключительная часть этой схемы от точки выхода из четвертого разворота до точки приземления называется предпосадочной прямой . Она устанавливается такой длины, чтобы обеспечивалось безопасное снижение ВС с высоты круга полетов над аэродромом до его приземления.
В настоящее время применяют три типа систем посадки: радиотехническую ( ОСП ), радиомаячную ( РМС ), радиолокационную ( РСП ). В аэропортах нашей страны в качестве РМС эксплуатируются отечественные системы типа СП и различные варианты международной системы ИЛС .
Н аземное и бортовое оборудование системы посадки обеспечивает вывод ВС на аэродром, полет по установленной схеме захода и снижение по заданной траектории. Каждый аэродром, как правило, оборудуется дальней ДПРМ и ближней БПРМ приводными радиостанциями с радиокамерами, а также светосигнальными системами, огни которых облегчают взлет, посадку и руление ВС . ДПРМ – основная радионавигационная точка аэродрома. Радиосветотехнические средства обеспечения полетов на аэродромах размещают по утвержденным типовым схемам с учетом особенностей данного аэродрома (рис.1).
Основная задача любой системы посадки – обеспечение вывода ВС на линию курса и глиссаду снижения. При использовании посадочных систем под линией курса понимается горизонтальная линия, проходящая через продольную ось ВПП . Глиссадой снижения называется траектория снижения ВС в вертикальной плоскости при заходе на посадку. За траекторию снижения принимается линия движения нижней точки шасси. Выход на линию заданного посадочного курса и полет по ней при заходе на посадку по системе ОСП выполняют по ДПРМ , а после его пролета – по БПРМ . При заходе на посадку по РМС на указанную линию выходят по радиосигналам курсового радиомаяка ( КРМ ).
Для системы ОСП устанавливается расчетная глиссада, а для РМС – радиотехническая, которая задается с помощью глиссадного радиомаяка ( ГРМ ). Положение ВС относительно расчетной глиссады контролируют обычно только в двух точках при полете ДПРМ и БПРМ . При заходе на посадку по РМС информация о положении ВС относительно радиоглиссады выдается непрерывно на специальный указатель.
Для обеспечения безопасной высоты пролета препятствий, расположенных в секторе захода на посадку, для каждого направления захода на посадку устанавливается определенный угол наклона глиссады ( УНГ ). Поскольку зоны учета препятствий при заходе на посадку по системам ОСП и РМС имеют различные размеры, УНГ для указанных систем может быть неодинаковым. Правилами предусмотрено устанавливать УНГ в диапазоне 2 градуса 30 минут – 4 градуса . Рекомендуемые УНГ 2 градуса 40 минут – 3 градуса . В отдельных случаях для ВС третьего и четвертого классов допускается устанавливать УНГ до 5 градусов . При оптимальном УНГ = 2ЧО’ ВС пролетает ДПРМ и БПРМ при их стандартном расположении на высотах соответственно 200 и 60 м .
Для аэродромов ГА установлены посадочные минимумы трех категорий, характеризуемые высотой принятия решения ВПР , которая соответствует высоте нижней границы облаков ( ВНГО ) и дальности видимости на ВПП . Минимум первой категории предусматривает заход на посадку до ВПР 60 м при дальности видимости на ВПП 800 м ; минимум второй категории: ВПР менее 60 м , но не менее 30 м , видимость на ВПП менее 800 м , но не менее 400 м ; минимум третьей категории: ВПР менее 30 м , видимость на ВПП менее 400 м . Таким образом, минимум аэродрома для посадки отражает минимально допустимые значения ВПР ( ВНГО ) и видимости на ВПП , при которых разрешается выполнять посадку на ВС данного типа.
Высота принятия решения ( ВПР ) – установленная относительная высота, на которой должен быть начат маневр ухода на второй круг (рис.1) в тех случаях, если до достижения этой высоты командиром ВС не был установлен необходимый визуальный контакт с ориентирами для продолжения захода на посадку или положение ВС в пространстве, или параметры его движения не обеспечивают безопасности посадки. ВПР принято отсчитывать от уровня порога ВПП по барометрическому высотомеру, который установлен на атмосферное давление аэродрома посадки. Под необходимым визуальным контактом с ориентирами подразумевается контакт с наземными ориентирами зоны захода на посадку или ВПП , которые командир ВС должен видеть в течение времени, достаточного для оценки положения ВС , и скорости изменения его положения относительно заданной траектории полета.
Для каждого аэродрома устанавливают определенные схемы снижения и захода на посадку, которые разрабатывают в соответствии с утвержденной методикой. При этом учитывают рельеф местности, направление расположения ВВП , особенности воздушной обстановки в районе аэродрома, направление подходов к нему и радиотехническое оборудование, экономичность и интенсивность полётов.
В гражданской авиации применяются следующие схемы снижения и захода на посадку: с прямой, по прямоугольному маршруту (малому небольшому), отворотом на расчётный угол, с подходом к направлению посадки под углом 45 градусов , стандартным разворотам и с обратного направления. Каждая схема имеет определённый вид и геометрические размеры. Для стандартизации схем по типам ВС принято три варианта схемы: первый - для ВС , у которых приборная скорость полёта по кругу более 300 км/ч ; второй - для ВС , имеющих приборную скорость полёта по кругу от 200 до 300 км/ч ; третий - для ВС , у которых приборная скорость полёта по кругу менее 200 км/ч . Схемы захода для каждого варианта рассчитывают применительно к тому ВС , которое при заходе на посадку на данном аэродроме имеет наибольшую приборную скорость полёта по кругу. Для каждого курса посадки составляют отдельную схему захода. Расчёт схем захода по ППП принято производить для угла крена на разворотах 15 или 25 градусов , а схем визуального захода - с углом крена 20 градусов . Схемы с углом крена 25 градусов на аэродромах ГА вводятся указанием МГА .
В зависимости от варианта схемы и угла крена на разворотах принята различная ширина манёвра захода на посадку, которая приведена в таблице 1 .
Способы инструментального захода на посадку изложены в документе 8168.
В международной практике наиболее часто применяются следующие способы инструментального захода на посадку:
1. Заход с прямой (Straight in Approach).
2. Обратная схема:
– стандартный разворот ( Procedure Turn ) ;
– обратный разворот ( Base Turn ).
3. Схема " Ипподром " (Race Track).
4. Заход по орбите ( Arc in Orbit ).
5. Векторение по локатору ( Vectoring Approach ).
Каждый из этих способов далее будет рассмотрен отдельно.
Особенности выполнения захода на посадку этими способами публикуются в полетных документах. Расчет схем захода на посадку производится с учетом индикаторных скоростей ВС на различных этапах захода. Выбор способов захода на посадку, а также их выполнение и публикация связаны со следующими правилами:
1. Все развороты при заходе на посадку должны выполняться с креном 25 ° (в США - 30 ° ) или с угловой скоростью 3 ° /сек.
2. Если на схеме обозначено положение посадочных устройств, но не обозначены курсы и время полета, нужно пользоваться данными для нормальной (стандартной) схемы.
3. Если на схеме не указаны посадочные устройства, курсы и время полета, заход выполняется по расчету экипажа, но так, чтобы максимальное удаление ВС от ВПП не превышало 15 морских миль.
4. Если на схеме обозначены курсы и время полета, заход на посадку выполняется строго по указанной схеме.
В случаях, когда экипаж ВС сообщает диспетчерской службе, что схема захода на посадку и порядок ее выполнения на данном аэродроме ему незнакомы, диспетчерская служба должна сообщить:
1. Установленную начальную высоту захода на посадку.
2. Место начала разворота, обычно в минутах полета от навигационной точки.
3. Высоту начала разворота.
4. Высоту выхода из последнего разворота.
5. Сведения о посадочной прямой.
Заход с прямой. Основной и самый экономичный способ захода на посадку. Разрешается при подходе ВС к посадочному курсу под углом не более 30 ° и удалении от торца ВПП не более 25 морских миль. При выполнении захода данным способом экипаж обязан строго выполнять команды диспетчерской службы, особенно в вертикальной плоскости, зная при этом минимальные безопасные эшелоны и высоты в районе данного аэродрома.
Стандартный разворот . Характерным для данного способа захода на посадку является возможность изменить направление полета на противоположное курсу посадки еще на начальном этапе схемы захода. Этод способ используется, когда линия пути удаления начинается от навигационного средства, установленного на аэродроме или вблизи него.
Схемы стандартного разворота могут быть левыми ( Procedure Tern Left ) или правыми ( Procedure Tern Right ). Название зависит от стороны начального отворота.
Существует два вида стандартного разворота:
1. Стандартный разворот 45 ° / 180 ° . Состоит из полета по заданной обратной линии пути с заданным временем полета (от 1 до 3 минут) от навигационного средства или контрольной точки, разворота на 45 ° в сторону от линии пути удаления, полета по прямой в течение 1 мин для воздушных судов категории А и В, или 1мин 15 сек для воздушных судов категории C,D и E с последующим разворотом на 180 ° для выхода на прямую приближения. Является альтернативой стандартному развороту 80 ° / 260 ° , если он не исключен специально. Наиболее удобен при использовании системы ILS, где последний разворот начинается в момент отшкаливания курсовой стрелки индикатора (НКП, КПП-М).
t = 1мин 15 сек (C,D,E)
Левый стандартный разворот 45 ° /180 °
45 ° /180 ° procedure tern left
1. Стандартный разворот 80 ° / 260 ° . Состоит из полета по заданной обратной линии пути с заданным временем полета (от 1 до 3 минут) от навигационного средства или контрольной точки, разворота на 80 ° в сторону от линии пути удаления с последующим разворотом на 260 ° в противоположном направлении для выхода на линию пути приближения. Является альтернативой стандартному развороту 45 ° / 180 ° , если он не исключен специально.
Левый стандартный разворот 80 ° /260 °
80 ° /260 ° procedure tern left
Обратная линия пути и (или) время полета по ней в обоих видах обратного разворота могут отличаться для разных категорий ВС. В этом случае публикуются отдельные схемы.
Обратный разворот на посадочный курс (углом отворота). Состоит из полета по указанной обратной линии пути и заданной длительности полета или расстояния по DME от навигационного средства с курсом, отличающимся от обратного посадочного на угол a , с последующим разворотом для выхода на линию пути приближения. Угол отворота a определяется по формуле a = 36 / t для ВС категорий А, В и a = 54 / t для ВС категорий C, D, E.
Обратный разворот на посадочный курс
Схема "Ипподром" (двумя разворотами на 180 ° ). Может иметь ту же конфигурацию, что и схема полета в зоне ожидания этого аэродрома, при соответствующих эксплуатационных скоростях и времени полета по прямой удаления.
Схема " Ипподром "
Racetrack procedures
Заход на посадку
Применяется в случаях, когда ВС прибывают, пролетая над контрольной точкой, с различных направлений (предполагается, что ВС будут входить в схему точно так же, как это предписывается в отношении входа в зону ожидания),и там, где расстояние прямолинейного участка не обеспечивает снижения до необходимой высоты, или когда нецелесообразно выполнять вход в обратную схему. Если продолжительность полета по схеме не обеспечивает снижения до необходимой высоты, может быть предусмотрено два или более полетов по этой схеме. Для повышения оперативной гибкости эта схема может применяться в качестве альтернативы обратным схемам (в этом случае она не обязательно публикуется отдельно).
Состоит из разворота от линии пути приближения на 180 ° после пролета навигационного средства или контрольной точки с выходом на обратную линию пути при длительности полета по этой линии в течение 1, 2 или 3 минут с последующим разворотом на 180 ° в том же направлении для возвращения на линию пути приближения. Вместо временного ограничения для полета по участку обратной линии пути, в качестве ограничения может использоваться расстояние по DME или пересекающий радиал (курс).
Особенностью этого способа является выход на линию пути удаления и полет по ней не от навигационного средства, поэтому необходимо выполнять определенные расчеты для выхода на линию пути удаления, особенно для определения момента разворота на прямую приближения.
Заход по орбите. Способ заключается в полете по окружности на определенной дальности по DME, со снижением до высоты не ниже указанной на схеме (обычно начальная высота выполнения схемы захода на посадку или высота входа в глиссаду), с целью вывода ВС в наивыгоднейшую точку разворота на прямую приближения с последующим полетом по прямой приближения для выполнения захода на посадку. Точка разворота на прямую приближения, как правило, маркируется радиалом от радионавигационного средства.
Векторение по локатору. Сущность этого метода заключается в том, что после пересечения границы или рубежа зоны векторения, экипаж ВС следует командам диспетчера, который сообщает требуемый курс полета и выводит, таким образом ВС в зону ± 30 ° от посадочного курса. После "захвата" сигнала курсового маяка, векторение прекращается.
ВИЗУАЛЬНЫЙ ЗАХОД НА ПОСАДКУ
(CIRCLE TO LAND)
Основным методом захода на посадку в международных аэропортах является инструментальный. Однако не на всех аэродромах, оборудованных устройствами для инструментального захода на посадку, имеются схемы захода на посадку по приборам. Особенностью визуального захода на посадку является то, при выполнении его схемы "коробочка" экипаж обязан видеть ВПП в процессе всего захода.
Визуальный заход на посадку и полет по прямоугольному маршруту типа "коробочка" применяется крайне редко. Термин "заход на посадку по кругу" вообще означает выполнение визуального полета по кругу над аэродромом перед посадкой.
Заход на посадку по кругу представляет собой визуальный маневр в полете. Условия полета по кругу каждый раз бывают различными, поскольку они зависят от таких переменных факторов, как расположение ВПП, линия пути конечного этапа захода на посадку, скорость ветра и метеорологические условия. Следовательно, невозможно разработать единую схему, которая была бы пригодна для выполнения захода на посадку по кругу в любых условиях.
После установления первоначального визуального контакта с ориентирами основное допущение заключается в том, что среду ВПП (то есть порог ВПП или светотехнические средства захода на посадку или другую маркировку, относящуюся к ВПП) следует непрерывно держать непрерывно держать в поле зрения при полете по кругу на MDA / H. Когда установлен надежный контакт с наземными ориентирами и экипаж решил совершить визуальный заход на посадку, он обязан сообщить об этом службе движения. При выполнении полета по кругу разрешается выполнять наиболее рациональные траектории полета в горизонтальном полете или со снижением с целью сокращения расстояния и экономии топлива. Если при установлении визуального контакта с землей доклад службе движения о визуальном контакте не производился, экипаж обязан выдерживать обязательные траектории.
Для выполнения визуального маневрирования (визуального полета по кругу) устанавливается зона визуального маневрирования, обозначаемая на диспетчерском радиолокаторе и ограниченная дугами, проведенными из центров порогов каждой ВПП. Радиус дуги зависит от посадочной категории ВС, рекомендуемой скорости ВС для захода на посадку для каждой категории, скорости ветра (учитывается скорость 46 км/ч или 25 узлов) и радиуса разворота (со средним креном 20 ° или угловой скоростью разворота 3 ° /сек) независимо от величины угла разворота). Пример расчета радиуса зоны визуального маневрирования представлен в таблице:
Тему управления энергией воздушного судна при заходе на посадку обсуждают достаточно часто. Тем не менее, за время моей работы в гражданской авиации я ни разу не слышал какой-либо внятной теории на этот счет. Обычно все рекомендации сводятся к тому, что важно вовремя "гаситься", пораньше снижаться и в крайнем случае просить "орбиту" для потери высоты. Безусловно, данные способы умеют место быть, но ясного понимания теории управления энергией самолета это не дает.
В FCTM Airbus и Boeing на данный счет тоже почти ничего не написано. Есть, конечно, общие рекомендации и определения, но их, на мой взгляд, не достаточно. В данной статье с помощью базовых школьных знаний я постараюсь объяснить из чего состоит энергия воздушного судна и как ей управлять. Предложенная мной теория, безусловно, не претендует на абсолютную истину, но судя по опыту моей работы, она очень легко дается многим пилотам.
Несмотря на то, что современные воздушные суда обладают продвинутыми навигационными и автоматическими системами, способными выполнить заход на посадку в любых условиях, именно пилот несет ответственность за планирование и выполнение полета. По этой причине люди, находящиеся в кабине, обязаны четко понимать как считать профиль снижения и предотвращать риск попадания в затруднительные ситуации.
Заход с прямой. Нормальный профиль снижения.
Осуждение начнем, пожалуй, с самого элементарного.
В общем случае, нормальным профилем снижения является траектория c углом наклона в 3 градуса. Для определения потребной высоты, удаление от точки приземления (торца ВПП) или DME умножается на 3. То есть, дистанции 40 миль соответствует высота 12 000 футов, дистанции 80 миль - высота 24 000 футов и так далее.
В идеальных условиях снижение по данному профилю обеспечивает безопасный и спокойный заход на посадку. Однако, я предпочитаю выполнять полёт немного ниже нормальной траектории, поскольку попутный ветер может значительно увеличить путевую скорость и, как следствие, потребный градиент снижения. Дабы не решать проблему тогда, когда она появится, а предотвратить ее возникновение, я снижаюсь на 1000 футов ниже нормального профиля.
Рекомендации
При использовании формулы Required FL = Distance x 3, выберите комфортный для вас самих запас высоты. Кому-то достаточно 1000 футов, кому-то - 2000 футов. Помните, что за сэкономленное топливо вас никто не похвалит, а за ненужный уход на второй круг - тем более.
Что такое заход на посадку с физической точки зрения?
Теперь обратимся непосредственно к нашей теме. Заход на посадку, по сути, представляет собой постоянное уменьшение энергии воздушного судна до значения, требуемого для безопасного приземления.
На картинке сверху величина энергии воздушного судна представлена в виде цветового градиента, где красный цвет соответствует большой энергии, а зеленый - малой.
Из общего курса физики нам известно, что любое тело имеет определеную энергию. Она, в свою очередь, состоит из суммы энергии потенциальной и кинетической. При этом, потенциальная энергия характеризуется высотой, а кинетическая - скоростью.
Поскольку самолет, по сути, является таким же объектом, как камень, метеорит или бейсбольный мяч, его энергия выражается через те же самые формулы, которые дети изучают в 8 классе. В частности, для описания процесса управления энергией воздушного судна, мы смело можем использовать формулу полной механической энергии, представленную на картинке выше.
Учитывая то, что ускорение свободного падения неизменно, а масса воздушного судна при заходе на посадку уменьшается лишь незначительно, основным способом управления энергией самолета является изменение его высоты и скорости. При этом, важно осознавать, что тяга двигателей сама по себе не влияет на изменение энергии воздушного судна. Планер, к примеру, выполняет полет без наличия силовой установки.
Отражение теории мы можем видеть на практике. Данные о высоте и скорости самолета представлены на PFD Boeing, Airbus, Embraer и т. д.
Управление энергией через изменение высоты и скорости.
Рассмотрим то, как общая энергия воздушного судна меняется при различных значениях высоты и скорости.
На картинке выше рассмотрены три варианта нахождения воздушного судна относительно нормальной траектории снижения. Обратите внимание на то, что во всех трех примерах уровень полной энергии остается постоянным. Причиной этому является то, что в варианте (2) при избытке высоты воздушное судно имеет меньшую скорость, а в варианте (3) при избытке скорости воздушное судно имеет меньшую высоту.
Каким образом относительная энергия воздушного судна может быть увеличена без вмешательства пилотов?
Допустим, согласно инструкции диспетчера ОВД, экипаж должен выдерживать заданную высоту. При этом, воздушное судно оказывается значительно выше нормального профиля снижения. Грамотный экипаж в данном случае уменьшит приборную скорость самолета, это сократит кинетическую энергию и позволит предотвратить рост общей энергии. На картинке выше видно, что в точке (2) по сравнению с точкой (1) значение высоты больше, однако общая энергия остается неизменной благодаря уменьшению скорости. В случае, если экипаж не уменьшит скорость воздушного судна, общая энергия вырастет, что приведет к её избытку и последующему появлению проблемы ее уменьшения.
Как обсуждалось ранее, заход на посадку представляет собой постепенное уменьшение полной энергии воздушного судна. Соответственно, сохранение высоты и скорости при приближении к аэропорту влечет за собой увеличение относительной энергии самолета.
Следующая картинка наглядно показывает как рост скорости и высоты влияет на увеличение полной энергии воздушного судна.
Какие выводы можно сделать из вышесказанного?
Если вы находитесь выше профиля, уменьшайте скорость. В последующем вы сможете эффективно перевести потенциальную энергию в кинетическую (быстро потерять высоту за счет роста приборной скорости).
Если вам необходимо поддержать высокую скорость, обязательно снижайтесь заранее, дабы не увеличивать уровень энергии воздушного судна до запредельных значений.
Практические примеры
Если вы находитесь выше профиля и у вас нет возможности для увеличения вертикальной скорости, нет никакого смысла поддерживать высокую приборную скорость полета. Это лишь уменьшает градиент снижения и ускоряет приближение к точке приземления. Кроме того, высокая приборная скорость лишает вас шанса на перевод потенциальной энергии в кинетическую, скорость имеет определенные ограничения.
К примеру, вертикальная скорость ВС Airbus A320 при снижении с приборной скоростью 280 узлов составляет в среднем 2000 футов в минуту. При этом, снижение на скорости в 220 узлов позволяет получить вертикальную скорость около 1200-1400 футов в минуту, что не намного меньше.
Если при сохранении приборной скорости 280 узлов выпустить воздушные тормоза, то вертикальная скорость достигнет значений около 3000 футов в минуту.
В случае, если при сохранении высоты экипаж предусмотрительно уменьшил приборную скорость, то он может получить много больший градиент снижения даже без применения воздушных тормозов. В указанном выше примере использование тормозных щитков позволит достигнуть вертикальную скорость около 5500-6000 футов в минуту.
Безусловно, снижение с такой интенсивностью не всегда комфортно для пассажиров, однако важно понимать то, что проблемы избытка высоты и скорости надо решать "наверху", а не около земли. При этом, не всегда получается выполнить "орбиту" или встать в зону ожидания, поэтому обычно лучше быть готовым к любой ситуации.
Что говорит "букварь"?
"If the descent is delayed, a "DECELERATE" or "T/D REACHED" message appears in white on the PFD and in amber on the MCDU. Speed should be reduced towards green dot, and when cleared for descent, the pilot will push for DES and push for managed speed. The speed reduction prior to descent will enable the aircraft to recover the computed profile more quickly as it accelerates to the managed descent speed (NO-090 P 3/8 FCTM A320)".
В случае, если вы достигли расчетной ТОЧКИ снижения, но разрешение на снижение получить не удается, уменьшайте приборную скорость, дабы в последующем быстрее догнать нормальную траекторию. FCTM Airbus A320 вкратце говорит о том же, что мы обсуждали ранее, правда здесь есть одно "но". Я специально выделил слово "Т ОЧКА ", поскольку Airbus описывает только лишь процедуру начала снижения, однако данная техника может быть применима ко всему заходу на посадку. То есть, если вас "подвесили" в 50 милях от аэропорта, не стоит держать скорость 280 узлов, этим вы лишь усугубите свое положение.
Проблема применения автоматики при заходе на посадку
Честно говоря, я не сторонник "максимального уровня автоматизации", поскольку летая с применением режимов DES (Airbus) и VNAV (Boeing), пилоты теряют навык ситуационной осведомленности. Причиной многих проблем является то, что автоматика может управлять самолетом, но она не может предвидеть развитие потенциально проблемной ситуации. Часто ошибкой пилотов является то, что на автопилот возлагают чрезмерные надежды, мол "он сам знает как лучше". На мой взгляд, это категорически неправильно и, по большому счету, опасно.
При заходе с прямой проблем обычно не бывает. Причина состоит в том, что дистанция маршрута захода на посадку примерно соответствует прямому удалению от торца ВПП. Векторение воздушного судна не может значительно сократить маршрут прибытия.
Сложности с применением автоматических систем начинаются тогда, когда маршрут прибытия выглядит следующим образом.
Здесь прямая дальность до точки входа в глиссаду составляет 60 миль, в то время как дистанция всего маршрута захода на посадку равняется примерно 100 милям. В случае, если высота воздушного судна составляет 30 000 футов, то при применении режима DES (VNAV) все как-бы хорошо. Однако, если диспетчер ОВД "спрямит" самолет в район точки FF01, экипаж окажется в затруднительной ситуации: и высота, и скорость самолета слишком велики для захода на посадку.
По этой причине экипаж всегда должен оценивать возможные варианты развития ситуации и готовиться к возможным проблемам. Так, если в указанном выше примере возможно "спрямление", целесообразно уменьшить скорость, дабы иметь возможность быстрой потери высоты в будущем. Сохранение высокой путевой скорости, в свою очередь, лишает экипаж как времени, так и запаса энергии воздушного судна.
Послесловие.
В данной статье мы обсуждали только лишь вопрос определения энергии воздушного судна и управления ею. Умения правильно анализировать ситуацию и прогнозировать потенциальные проблемы - навыки, которые приходят с опытом полетов. Наша задача - пригласить коллег к размышлению о том, что есть энергия воздушного судна и как доходчиво объяснить теорию управления энергией молодым пилотам.
Читайте также: