
Зачем вертолет делает круг перед посадкой
Добавил пользователь Валентин П. Обновлено: 19.09.2024
Вертолет – это винтокрылая машина, в которой подъемную силу и силу тяги создает винт. Несущий винт служит для поддержания и перемещения вертолета в воздухе. При вращении в горизонтальной плоскости несущий винт создает тягу(Т) направленную вверх, выполняет роль подъёмной силы(Y). Когда тяга несущего винта будет больше веса вертолета(G), вертолет без разбега оторвется от земли и начнет вертикальный набор высоты. При равенстве веса вертолета и тяги несущего винта вертолет будет неподвижно висеть в воздухе. Для вертикального снижения достаточно тягу несущего винта сделать несколько меньше веса вертолета. Поступательное движение вертолета(P) обеспечивается наклоном плоскости вращения несущего винта при помощи системы управления винтом. Наклон плоскости вращения винта вызывает соответствующий наклон полной аэродинамической силы, при этом ее вертикальная составляющая будет удерживать вертолет в воздухе, а горизонтальная — вызывать поступательное перемещение вертолета в соответствующем направлении.
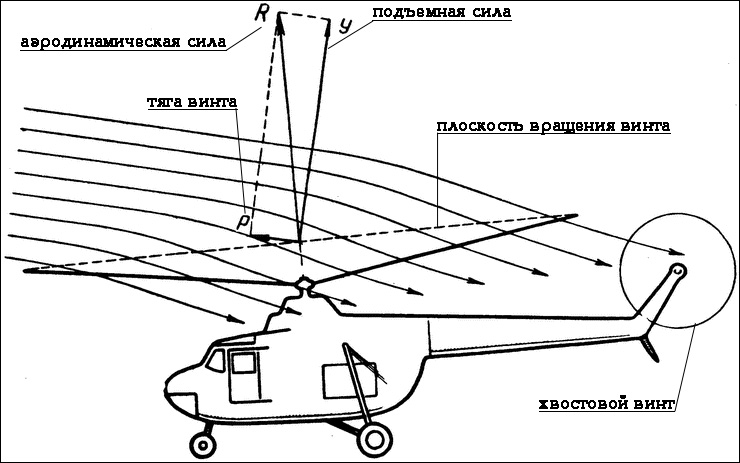
Рис 1. Схема распределения сил
Конструкция вертолета
Фюзеляж является основной частью конструкции вертолета, служащей для соединения в одно целое всех его частей, а также для размещения экипажа, пассажиров, грузов, оборудования. Он имеет хвостовую и концевую балки для размещения хвостового винта вне зоны вращения несущего винта,и крыла (на некоторых вертолетах крыло устанавливается с целью увеличения максимальной скорости полета за счет частичной разгрузки несущего винта (МИ-24)).Силовая установка(двигатели) является источником механической энергии для приведения во вращение несущего и рулевого винтов. Она включает в себя двигатели и системы, обеспечивающие их работу (топливную, масляную, систему охлаждения, систему запуска двигателей и др.). Несущий винт(НВ) служит для поддержания и перемещения вертолета в воздухе, и состоит из лопастей и втулки несущего винта. Рулевой винт служит для уравновешивания реактивного момента, возникающего при вращении несущего винта, и для путевого управления вертолетом. Сила тяги рулевого винта создает момент относительно центра тяжести вертолета, уравновешивающий реактивный момент несущего винта. Для разворота вертолёта достаточно изменить величину тяги рулевого винта. Рулевой винт так же состоит из лопастей и втулки. Управление несущим винтом производится при помощи специального устройства, называемого автоматом перекоса. Управление рулевым винтом производится от педалей. Взлетно-посадочные устройства служат опорой вертолета при стоянке и обеспечивают перемещение вертолета по земле, взлет и посадку. Для смягчения толчков и ударов они снабжены амортизаторами. Взлетно-посадочные устройства могут выполняться в виде колесного шасси, поплавков и лыж
Рис.2 Основные части вертолета:
1 — фюзеляж; 2 — авиадвигатели; 3 — несущий винт (несущая система); 4 — трансмиссия; 5 — хвостовой винт; 6 — концевая балка; 7 — стабилизатор; 8 — хвостовая балка; 9 — шасси
Принцип создания подъемной силы винтом и система управления винтом
При вертикальном полете п олная аэродинамическая сила несущего винта выразится как произведение массы воздуха, протекающего через поверхность, сметаемую несущим винтом за одну секунду, на скорость уходящей струи:
где πD 2 /4 - площадь поверхности, ометаемой несущим винтом; V— скорость полета в м/сек; ρ — плотность воздуха; u — скорость уходящей струи в м/сек.
По сути сила тяги винта равна силе реакции при ускорении воздушного потока
Для того чтобы вертолет двигался поступательно, нужен перекос плоскости вращения винта, причем изменение плоскости вращения достигается не наклоном втулки несущего винта (хотя визуальный эффект может быть именно такой), а изменением положения лопасти в разных частях квандрантов описываемой окружности.
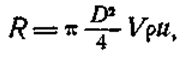
Лопасти несущего винта, описывая полный круг вокруг оси при его вращении, обтекаются встречным потоком воздуха по-разному. Полный круг – это 360º . Тогда примем заднее положение лопасти за 0º и далее через каждые 90º полный оборот. Так вот лопасть в интервале от 0º до 180º – это лопасть наступающая , а от 180º до 360º – отступающая . Принцип такого названия, я думаю, понятен. Наступающая лопасть движется навстречу набегающему потоку воздуха, и суммарная скорость ее движения относительно этого потока возрастает потому что сам поток, в свою очередь, движется ей навстречу. Ведь вертолет летит вперед. Соответственно растет и подъемная сила.
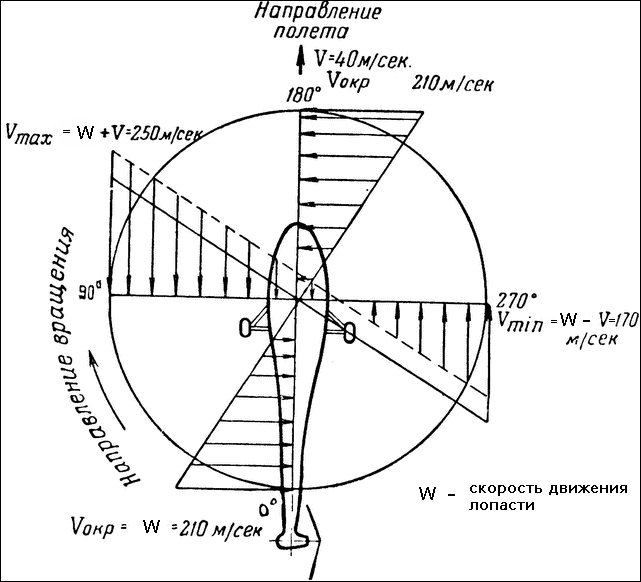
Рис.3 Изменение скоростей набегающего потока при вращении винта для вертолета МИ-1 (средние скорости полета).
Чтобы этого не происходило, конструктора применили одну хитрость. Дело в том, что лопасти несущего винта закреплены во втулке (это такой массивный узел, насаженный на выходной вал), но не жестко. Они с ней соединены с помощью специальных шарниров (или устройств, им подобных). Шарниры бывают трех видов: горизонтальные, вертикальные и осевые.
Теперь посмотрим что же будет происходить с лопастью, которая подвешена к оси вращения на шарнирах. Итак, наша лопасть вращается с постоянной скоростью без каких-либо управляющих воздействий извне .
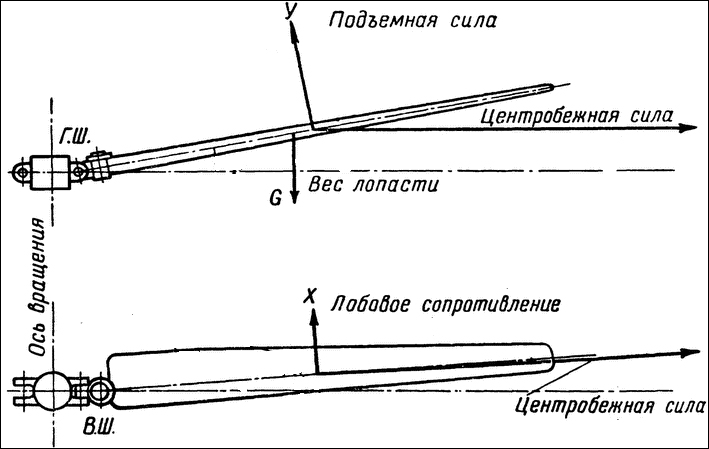
Рис. 4 Силы, действующие на лопасть, подвешенную ко втулке винта на шарнирах.
Однако при взмахе получается, что воздух относительно лопасти приобретает еще и некоторое движение вниз и, таким образом, угол атаки относительно набегающего потока уменьшается. То есть рост избыточной подъемной силы замедляется. На это замедление оказывает свое дополнительно влияние отсутствие управляющего воздействия. Это значит, что тяга автомата перекоса, присоединенная к лопасти, сохраняет свое положение неизменным, и лопасть, взмахивая, вынуждена поворачиваться в своем осевом шарнире, удерживаемая тягой и, тем самым, уменьшая свой установочный угол или угол атаки по отношению к набегающему потоку. (Картина происходящего на рисунке. Здесь У – это подъемная сила, Х – сила сопротивления, Vy – вертикальное движение воздуха, α – угол атаки.)
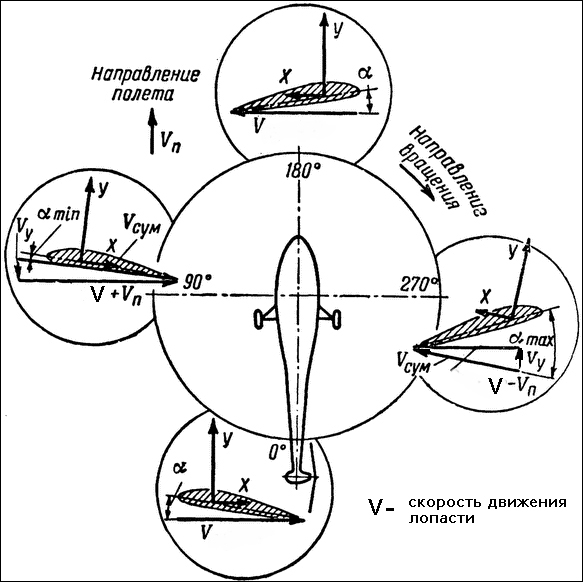
Рис.5 Картина изменения скорости и угла атаки набегающего потока при вращении лопасти несущего винта.
До точки 90º избыточная подъемная сила будет продолжать расти, однако из-за вышесказанного со все большим замедлением. После 90º эта сила будет уменьшаться, но из-за ее присутствия лопасть будет продолжать двигаться вверх, правда все медленнее. Максимальную высоту взмаха она достигнет уже несколько перевалив за точку 180º . Это происходит потому, что лопасть имеет определенный вес, и на нее действуют еще и силы инерции .
При дальнейшем вращении лопасть становится отступающей, и на нее действуют все те же процессы, но уже в обратном направлении. Величина подъемной силы падает и центробежная сила вместе с силой веса начинают опускать ее вниз. Однако при этом растут углы атаки для набегающего потока (теперь уже воздух движется вверх по отношению к лопасти), и растет установочный угол лопасти из-за неподвижности тяг автомата перекоса вертолета . Все происходящее поддерживает подъемную силу отступающей лопасти на необходимом уровне. Лопасть продолжает опускаться и минимальной высоты взмаха достигает уже где-то после точки 0º , опять же из-за сил инерции.
Однако несмотря на свою незначительность вертикальное отклонение лопастей присутствует, и несущий винт при вращении описывает конус, правда очень пологий. Основание этого конуса и есть плоскость вращения винта (см рис1.)
Для придания вертолету поступательного движения нужно эту плоскость наклонить, дабы появилась горизонтальная составляющая полной аэродинамической силы, то есть горизонтальная тяга винта. Иначе говоря, нужно наклонить весь воображаемый конус вращения винта. Если вертолету нужно двигаться вперед, значит конус должен быть наклонен вперед.
Исходя из описания движения лопасти при вращении винта, это означает, что лопасть в положении 180º должна опуститься, а в положении 0º (360º) должна подняться. То есть в точке 180º подъемная сила должна уменьшиться, а в точке 0º(360º) увеличиться. А это в свою очередь можно сделать уменьшив установочный угол лопасти в точке 180º и увеличив его в точке 0º (360º) . Аналогичные вещи должны происходить при движении вертолета в других направлениях. Только при этом, естественно, аналогичные изменения положения лопастей будут происходить в других угловых точках.
Понятно, что в промежуточных углах поворота винта между указанными точками установочные углы лопасти должны занимать промежуточные положения, то есть угол установки лопасти меняется при ее движении по кругу постепенно, циклично .Он так и называется циклический угол установки лопасти ( циклический шаг винта ). Я выделяю это название потому, что существует еще и общий шаг винта (общий угол установки лопастей). Он изменяется одновременно на всех лопастях на одинаковую величину. Обычно это делается для увеличения общей подъемной силы несущего винта.
Такие действия выполняет автомат перекоса вертолета . Он изменяет угол установки лопастей несущего винта (шаг винта), вращая их в осевых шарнирах посредством присоединенных к ним тяг. Обычно всегда присутствуют два канала управления: по тангажу и по крену, а также канал изменения общего шага несущего винта.
Тангаж означает угловое положение летательного аппарата относительно его поперечной оси (нос вверх-вниз ), а крен , соответственно, относительно его продольной оси (наклон влево-вправо ).
Конструктивно автомат перекоса вертолета выполнен достаточно сложно, но пояснить его устройство вполне можно на примере аналогичного узла модели вертолета. Модельный автомат, конечно, устроен попроще своего старшего собрата, но принцип абсолютно тот же .
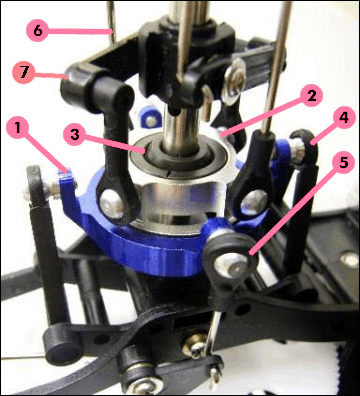
Рис. 6 Автомат перекоса модели вертолета
Это двухлопастной вертолет. Управление угловым положением каждой лопасти осуществляется через тяги 6 . Эти тяги соединены с так называемой внутренней тарелкой 2 (из белого металла). Она вращается вместе с винтом и в установившемся режиме параллельна плоскости вращения винта. Но она может менять свое угловое положение (наклон), так как закреплена на оси винта через шаровую опору 3 . При изменении своего наклона (углового положения) она воздействует на тяги 6 , которые, в свою очередь, воздействуют на лопасти, поворачивая их в осевых шарнирах и меняя, тем самым, циклический шаг винта.
Внутренняя тарелка одновременно является внутренней обоймой подшипника, внешняя обойма которого – это внешняя тарелка винта 1 . Она не вращается, но может менять свой наклон (угловое положение) под воздействием управления по каналу тангажа 4 и по каналу крена 5 . Меняя свой наклон под воздействием управления внешняя тарелка меняет наклон внутренней тарелки и в итоге наклон плоскости вращения несущего винта. В итоге вертолет летит в нужном направлении .
Общий шаг винта меняется перемещением по оси винта внутренней тарелки 2 при помощи механизма 7 . В этом случае угол установки меняется сразу на обеих лопастях.
Для более лучшего понимания помещаю еще несколько иллюстраций втулки винта с автоматом перекоса.
Рис. 7 Втулка винта с автоматом перекоса (схема).
Рис. 8 Поворот лопасти в вертикальном шарнире втулки несущего винта.
Если во время полета у самолета отказывают двигатели, пилот имеет шанс спланировать и спасти машину и пассажиров. Бытует мнение, что раз у вертолета нет крыльев, то он не может планировать. Неужели отказ двигателя означает гибель винтокрылой машины? Нет, вертолет может совершить посадку в режиме авторотации винта.

Авторотация – вращение несущего винта вертолета с помощью набегающего потока воздуха. Во время авторотации создается подъемная сила, достаточная для планирования, маневрирования и мягкой посадки судна.
Режим авторотации чаще всего используется для аварийной посадки вертолета при отказе двигателя. Также она применяется, когда выходит из строя рулевой винт (или нарушается управление по рысканью), в результате чего продолжать нормальный полет невозможно.
Авторотация – это аварийный режим, который тем не менее необходимо освоить любому пилоту, но только под руководством опытного инструктора. От умения управлять вертолетом в режиме авторотации зависит жизнь экипажа и пассажиров.
Как работает авторотация
Когда несущий винт вертолета раскручивается за счет энергии двигателя, он создает нисходящий воздушный поток и функционирует по принципу пропеллера, который ориентирован в пространстве горизонтально.
Если во время полета перестает работать двигатель, скорость вращения винта начнет падать, а машина ‒ терять скорость и снижаться. В этот момент на лопасти начинает действовать набегающий снизу поток воздуха. Это воздействие, при соблюдении определенных условий, раскручивает несущий винт, который снова создает подъемную силу. В режиме авторотации винт работает как горизонтально ориентированная ветряная мельница.
Чтобы при авторотации кинетическая энергия не тратилась на вращение двигателя, в вертолетах используется обгонная муфта. Это элемент трансмиссии, который блокирует передачу крутящего момента с ведомого вала на ведущий. Обгонные муфты также используются в велосипедах. Благодаря этим устройствам педали не вращаются, когда велосипедист едет с горы по инерции.
Кстати, у гиропланов (автожиров) несущий винт вращается и создает подъемную силу только за счет авторотации. Воздушные суда этого типа похожи на вертолеты внешне, но летают они скорее по принципу самолетов.

Как посадить вертолет в режиме авторотации
Аварийная посадка в режиме авторотации входит в курс подготовки пилотов гражданских вертолетов. Алгоритм действия летчика зависит от типа воздушного судна, высоты и скорости полета, места посадки и других факторов. Схематически его можно описать так:
Легкие вертолеты, например, Robinson R44, в режиме авторотации под управлением опытного пилота могут ненадолго зависать в воздухе. Благодаря этому посадка получается мягкой. Управлять тяжелыми воздушными судами при отказе двигателя сложнее. Поэтому посадить их с помощью авторотации без повреждений удается не всегда, но такие вертолеты всегда снабжены двумя двигателями, что значительно повышает уровень безопасности.
Видео посадки вертолета в режиме авторотации
Двойной рекорд Жана Буле
Французский пилот Жан Буле в 1972 году установил за один полет сразу два рекорда, которые не побиты до настоящего времени. Летчик рассчитывал достичь рекордной высоты на своем Aérospatiale SA.315B Lama. Это ему удалось: машина поднялась на фантастическую высоту ‒ 12 442 метра над уровнем моря.
А вот второй рекорд получился спонтанным. У Жана Буле не оставалось выбора, так как на огромной высоте из-за перегрузок вышел из строя двигатель. Пилот перешел в режим авторотации и посадил машину. Летчик и его машина даже не получили повреждений.
После необычного полета Жан Буле остался в авиации. До выхода на пенсию он работал летчиком-испытателем ВВС Франции.
Режим авторотации позволяет мягко посадить вертолет в случае отказа двигателя. Выход из строя силовой установки – это, без сомнения, крайне опасная аварийная ситуация. В таких условиях у летчиков остается единственный шанс избежать катастрофы, но действовать необходимо быстро. Именно поэтому в программу подготовки пилотов вертолетов входит тренировка посадки в режиме авторотации. Конечно, для гарантированно мягкой посадки в тренировочных полетах за несколько метров до земли двигатель вновь запускают, но навык закрепляется и совершенствуется без малейшего вреда для воздушного судна и его экипажа.
Пилотов готовят к посадке со свободно вращающимся винтом в расчете на то, что они будут действовать в аварийной ситуации так же уверенно и спокойно, как и во время штатного полета. А это повышает безопасность пассажиров и вероятность мягкой посадки.

6. После перехода в режим горизонтального полета произвести круговой осмотр воздушного пространства, прослушать и проанализировать радиоинформацию (о выполнении 3-го разворота или запросе посадки другими экипажами), наблюдать за впереди идущим вертолетом, сохраняя установленную дистанцию. Проверить параллельность линии полета с осью ВПП.
7. От второго к третьему развороту, убедившись, что маршрут не пересекает другой вертолет, занять установленную дистанцию, тщательно просматривать переднюю полусферу. Проверить параллельность линии пути относительно стартовых знаков, определить ширину прямоугольного маршрута по удалению "Т" от места вертолета.
8. Перед третьим разворотом провести круговой осмотр воздушного пространства, обратить особое внимание на внешнюю сторону круга (нет ли воздушных судов, входящих в круг из зон, или вертолетов, летящих по большому кругу), прослушивать радиоинформацию (нет ли докладов о входе в круг) и, услышав доклад, обнаружить этот вертолет и следовать за ним на безопасной дистанции, убедившись в отсутствии вертолетов внутри круга. Определить момент начала 3-го разворота по углу визирования посадочного "Т" относительно вертолета (45°).
9. При выполнении 3-го разворота осмотреть передний сектор, верхнюю полусферу и внутреннюю часть круга, оценить радиоинформацию, просмотреть внешнюю часть круга, чтобы не пересечь круг другим вертолетам.
10. После 3-го разворота осмотреть окружающее пространство, следить за внешней стороной круга (нет ли вертолетов, входящих в круг к 3 и 4-му разворотам), прослушать радиообмен и определить, нет ли запросов о входе в круг к этим разворотам, постоянно следить за внутренней стороной круга (нет ли вертолетов).
11. Перед 4-м разворотом осмотреть переднюю полусферу, наблюдать за внешней стороной круга и верхней полусферой (нет ли вертолетов, входящих вкруг в районе 4-го разворота), определить момент начала разворота по углу визирования посадочного "Т".
12. При выполнении 4-го разворота осмотреть передний сектор. Выход на посадочный курс уточнять изменением величины крена.
13. При снижении после 4-го разворота осмотреться и убедиться, что посадочная полоса (посадочная площадка) свободна и посадка разрешена, а также убедиться, что впереди летящие вертолеты находятся на безопасном расстоянии (200 м) и боковом интервале (50 м).
14. Просмотреть посадочную полосу (посадочную площадку) и убедиться, что никаких препятствий, мешающих посадке, нет.
Если во время полета у самолета отказывают двигатели, пилот имеет шанс спланировать и спасти машину и пассажиров. Бытует мнение, что раз у вертолета нет крыльев, то он не может планировать. Неужели отказ двигателя означает гибель винтокрылой машины? Нет, вертолет может совершить посадку в режиме авторотации винта.
Авторотация – вращение несущего винта вертолета с помощью набегающего потока воздуха. Во время авторотации создается подъемная сила, достаточная для планирования, маневрирования и мягкой посадки судна.
Режим авторотации чаще всего используется для аварийной посадки вертолета при отказе двигателя. Также она применяется, когда выходит из строя рулевой винт (или нарушается управление по рысканью), в результате чего продолжать нормальный полет невозможно.
Авторотация – это аварийный режим, который тем не менее необходимо освоить любому пилоту, но только под руководством опытного инструктора. От умения управлять вертолетом в режиме авторотации зависит жизнь экипажа и пассажиров.
Как работает авторотация
Когда несущий винт вертолета раскручивается за счет энергии двигателя, он создает нисходящий воздушный поток и функционирует по принципу пропеллера, который ориентирован в пространстве горизонтально.
Если во время полета перестает работать двигатель, скорость вращения винта начнет падать, а машина ‒ терять скорость и снижаться. В этот момент на лопасти начинает действовать набегающий снизу поток воздуха. Это воздействие, при соблюдении определенных условий, раскручивает несущий винт, который снова создает подъемную силу. В режиме авторотации винт работает как горизонтально ориентированная ветряная мельница.
Чтобы при авторотации кинетическая энергия не тратилась на вращение двигателя, в вертолетах используется обгонная муфта. Это элемент трансмиссии, который блокирует передачу крутящего момента с ведомого вала на ведущий. Обгонные муфты также используются в велосипедах. Благодаря этим устройствам педали не вращаются, когда велосипедист едет с горы по инерции.
Кстати, у гиропланов (автожиров) несущий винт вращается и создает подъемную силу только за счет авторотации. Воздушные суда этого типа похожи на вертолеты внешне, но летают они скорее по принципу самолетов.
Как посадить вертолет в режиме авторотации
Аварийная посадка в режиме авторотации входит в курс подготовки пилотов гражданских вертолетов. Алгоритм действия летчика зависит от типа воздушного судна, высоты и скорости полета, места посадки и других факторов. Схематически его можно описать так:
Легкие вертолеты, например, Robinson R44, в режиме авторотации под управлением опытного пилота могут ненадолго зависать в воздухе. Благодаря этому посадка получается мягкой. Управлять тяжелыми воздушными судами при отказе двигателя сложнее. Поэтому посадить их с помощью авторотации без повреждений удается не всегда, но такие вертолеты всегда снабжены двумя двигателями, что значительно повышает уровень безопасности.
Видео посадки вертолета в режиме авторотации
Двойной рекорд Жана Буле
Французский пилот Жан Буле в 1972 году установил за один полет сразу два рекорда, которые не побиты до настоящего времени. Летчик рассчитывал достичь рекордной высоты на своем Aérospatiale SA.315B Lama. Это ему удалось: машина поднялась на фантастическую высоту ‒ 12 442 метра над уровнем моря.
А вот второй рекорд получился спонтанным. У Жана Буле не оставалось выбора, так как на огромной высоте из-за перегрузок вышел из строя двигатель. Пилот перешел в режим авторотации и посадил машину. Летчик и его машина даже не получили повреждений.
После необычного полета Жан Буле остался в авиации. До выхода на пенсию он работал летчиком-испытателем ВВС Франции.
Режим авторотации позволяет мягко посадить вертолет в случае отказа двигателя. Выход из строя силовой установки – это, без сомнения, крайне опасная аварийная ситуация. В таких условиях у летчиков остается единственный шанс избежать катастрофы, но действовать необходимо быстро. Именно поэтому в программу подготовки пилотов вертолетов входит тренировка посадки в режиме авторотации. Конечно, для гарантированно мягкой посадки в тренировочных полетах за несколько метров до земли двигатель вновь запускают, но навык закрепляется и совершенствуется без малейшего вреда для воздушного судна и его экипажа.
Пилотов готовят к посадке со свободно вращающимся винтом в расчете на то, что они будут действовать в аварийной ситуации так же уверенно и спокойно, как и во время штатного полета. А это повышает безопасность пассажиров и вероятность мягкой посадки.
Читайте также: