
Посадка подводной лодки это
Добавил пользователь Владимир З. Обновлено: 19.09.2024
Теория подводной лодки — отрасль теории корабля, изучающая мореходные качества подводной лодки (ПЛ) и её особенности по сравнению с надводным кораблём (судном).
Как и общая теория корабля, включает основные разделы: плавучесть, остойчивость, ходкость и качку. Иногда, для привязки к общей физике, их обобщают в динамику и статику корабля. Кроме того, имеет разделы: непотопляемость, мореходность, управляемость, спуск на воду. Поскольку ПЛ характеризуется двумя основными положениями — надводным и подводным, эти мореходные качества, за исключением спуска на воду, также подразделяются на надводные и подводные.
Впервые основы теории подводного плавания были опубликованы в 1578 году в труде англичанина Уильяма Бэрна. [1]
Надводная плавучесть
Надводная плавучесть ПЛ, аналогично плавучести надводного корабля, характеризуется запасом плавучести. То есть, отношением водонепроницаемых объемов выше ватерлинии (ВЛ), ко всему водонепроницаемому объему, и выражается в процентах.
Например, если общий объем ПЛ — 3000 м³, а надводной части — 600 м³, то запас плавучести:
W = 600/3000 * 100 = 20 %
То же отношение можно выразить в водоизмещениях. Для данного примера в дистиллированной воде (1 м³ = 1 т) водоизмещение будет
Dн = 3000 — 600 = 2400 т,
а водоизмещение ее полного объема Dп = 3000 т. Тогда
Подводная плавучесть
Плавучесть погруженной ПЛ. Разность сил поддержания на верхней и нижней частях корпуса создаёт остаточную плавучесть.
Подводная плавучесть принципиально отличается от надводной. Чтобы полностью погрузить лодку в воду, нужно довести её вес до веса воды, вытесняемой её полным объёмом. Иначе говоря, погасить запас плавучести до 0 % приёмом дополнительного груза (балласта), на практике — забортной воды. С точки зрения физики можно также считать, что лодка уменьшает свой объем, впуская окружающее море внутрь корпуса. В теории ПЛ принят первый подход — балластная вода считается собственностью лодки, то есть грузом. И говорят, что надводное водоизмещение меньше подводного. В нашем примере — 2400/3000 т. Как видим, запас плавучести можно выразить отношением надводного и подводного водоизмещений.
Однако, если принять больше груза, чем весит полностью погруженная ПЛ (создать отрицательную плавучесть), она будет не плавать в подводном положении, а тонуть — продолжать погружаться, пока не достигнет грунта или не разрушится. Поэтому жизненно важно, чтобы теоретическая подводная плавучесть была именно нейтральна — 0 %. Для надводного корабля это пограничное состояние приравнивается к потере плавучести, для ПЛ оно — повседневная норма.
На плавучесть, очевидно, влияют вес погруженного тела и плотность воды. Поскольку на практике ни то, ни другое не остается постоянным (лодка имеет остаточную плавучесть), поддержание нейтральной плавучести ПЛ под водой требует коррекций. Они производятся откачкой / приемом балласта, что называется вывеской ПЛ, или стабилизацией глубины.
Надводная остойчивость
Необходимо проверить точность фактов и достоверность сведений, изложенных в этой статье.
На странице обсуждения должны быть пояснения.
Принципы надводной остойчивости ПЛ также аналогичны остойчивости надводного корабля. Точно так же различают статическую и динамическую остойчивость.
ПЛ на ровном киле так же находится в положении неустойчивого [ источник не указан 4582 дня ] . равновесия. [2] [3] Центр величины (ЦВ, C) располагается под центром тяжести (ЦТ, G). При появлении крена Θ или дифферента Ψ, ЦВ смещается, сила поддержания γV образует с силой тяжести P плечо восстанавливающего момента mв.
Особенностью поперечной остойчивости ПЛ является то, что её корпус, по соображениям прочности, имеет круглое сечение. Поэтому, с увеличением крена, дополнительные объёмы, входящие в воду, незначительны (то есть остойчивость формы не растет). Восстанавливающий момент с нарастанием крена меняется мало. Невелика и начальная метацентрическая высота h.
Как на поперечную, так и на продольную надводную остойчивость ПЛ влияет наличие большого количества жидких грузов, как правило, имеющих свободные поверхности, — во вспомогательных балластных и специальных цистернах. Все они уменьшают запас динамической остойчивости. В отличие от надводного корабля, где стараются свободные поверхности допускать как можно меньше, ПЛ по самому своему устройству вынуждена их иметь.
По этой причине запас динамической надводной остойчивости у ПЛ меньше, чем у надводного корабля. То есть ПЛ, как правило, получаются более валкими на поверхности.
Подводная устойчивость
Подводная остойчивость ПЛ принципиально отличается от надводной. Под водой погруженный объем в целом постоянен. ЦВ не смещается. Поэтому восстанавливающий момент по типу надводного возникнуть не может. В подводном положении требуется устойчивое равновесие. То есть ЦТ должен находиться ниже ЦВ. Тогда любой крен или дифферент создаёт пару сил, спрямляющих лодку. Остойчивость формы при этом отсутствует, имеется только остойчивость веса. Однако любое смещение ЦТ влияет на положение лодки в воде — посадку.
Особенно лодка под водой чувствительна к продольным усилиям, вызывающим дифферент. Возникающие при этом опрокидывающие моменты (mкр), при отсутствии остойчивости формы, часто превышают спрямляющие, и опасны для лодки. Архимедовых сил для их компенсации недостаточно, и требуется искусственное вмешательство. Его осуществляют продольным смещением груза, называемым дифферентовкой. [4]
Устойчивость при погружении (всплытии)
Остойчивость при погружении (всплытии) представляет особый случай, при котором основные параметры, определяющие остойчивость, переменны. Происходит переход от неустойчивого равновесия (надводное положение) к устойчивому (подводное). Он сопровождается временным уменьшением остойчивости. Высота ЦВ (Zc) над основной плоскостью с глубиной растёт, высота ЦТ (Zg) сначала уменьшается, затем растёт, высота метацентра (Zm, не путать с метацентрической высотой) растёт, затем уменьшается, и снова растёт.
Их совместное влияние описывается диаграммой плавучести и начальной остойчивости подводной лодки. Две особые точки диаграммы: I — совпадение ЦВ и ЦТ. Восстанавливающий момент определяется только моментом остойчивости формы. II — уход под воду прочного корпуса. Метацентр сливается с ЦВ, метацентрическая высота минимальна.
При погружении и всплытии имеются большие чем когда-либо (кроме случаев повреждения) свободные поверхности — в цистернах главного балласта. Поэтому запас динамической остойчивости ПЛ минимален.
Надводная и подводная ходкость ПЛ резко различаются. Для ПЛ, как для надводного корабля, справедливы зависимости сопротивления от скорости хода. Сопротивление пропорционально квадрату скорости:
где V — скорость, f — коэффициент пропорциональности.
Потребная мощность пропорциональна кубу частоты вращения винта (винтовая характеристика):
где m — коэффициент, w — частота вращения.
Надводная ходкость характеризуется наличием волнового сопротивления (Xв), сопротивления формы (Xф) и сопротивления трения (Xт). На полном ходу в надводном положении волновое сопротивление достигает 50 — 60 % общего. Подводная ходкость отличается тем, что волновое сопротивление отсутствует Xв = 0 (начиная с глубины, равной половине длины лодки).
Таким образом, создать корпус, удовлетворяющий обоим режимам, невозможно. Более того, невозможен и удовлетворительный компромисс. Поэтому форму корпуса оптимизируют на более характерный режим.

Исторически наблюдаются два периода. Первый, когда подводный и надводный двигатели были полностью раздельны. ПЛ были в основном дизель-электрическими и проводили большую часть времени в надводном положении. ПЛ этого времени имели надстройку и лёгкий корпус с обводами, сближающими лодку с надводным кораблём. Надводная скорость этих ПЛ была, в типичном случае, больше подводной.
С появлением шноркеля (РДП) граница между подводным и надводным двигателем смазывается, а с появлением атомной энергетики лодки получают единый двигатель. Надводное положение становится не характерным. Поэтому форма корпуса полностью оптимизирована для подводного хода. С 1960-х гг она близка к идеальной гидродинамической — каплевидная, с относительным удлинением L/B = 6 ÷ 7. Минимизируется сопротивление формы. Основную долю (85 − 90 %) составляет сопротивление трения. Такие лодки способны развивать под водой большую скорость, чем на поверхности.
Надводная качка
Для ПЛ характерна в основном надводная качка. В надводном положении к ПЛ применимы все соображения, действующие при качке надводного корабля. Хотя лодка, как и надводный корабль, имеет все 6 степеней свободы, наибольшее влияние на нее оказывают бортовая и килевая качка.
Отличием бортовой качки ПЛ является большая амплитуда. По опыту эксплуатации, она может доходить до Θ = 60°, при волнении 5 - 6 баллов. [5]
Подводная качка
Подводная качка ПЛ сколько-нибудь заметна только в приповерхностном слое. Она оказывает влияние на эксплуатацию ПЛ использующих выдвижные устройства, прежде всего РДП, и на условия пуска ракет из подводного положения. Таким образом, речь идет о глубинах погружения от 10 м (перископная глубина) до 45 м (стартовая глубина).
Заливаемость головки РДП заметно влияет на вентиляцию ПЛ и накладывает требования на оборудование, зависящее от притока воздуха. Но для теории ПЛ качка на перископной глубине сходна с надводной.
Начиная с 1960-х годов проводились исследования приповерхностной качки ПЛ. [6] Результаты сводятся к следующему:

Подводными лодками называют класс кораблей, которые способны двигаться и выполнять другие действия полностью автономно под водой и на ее поверхности. Такие судна способны нести вооружение, а также могут быть приспособлены для различных специализированных операций. Рассмотрим, как устроена подводная лодка и как она работает.
Исторические факты
Самая первая информация о подобных плавательных средствах датируется 1190 годом. В одном из германских сказаний главный персонаж построил нечто вроде подводной лодки из кожи и сумел скрыться на ней от судов врага на морском дне. Это плавательное средство пробыло на дне 14 дней. Воздух внутрь подавался через трубку, второй конец которой был на поверхности. Каких-либо подробностей, чертежей, информации, как устроена подводная лодка, не сохранилось.
Более-менее реальные основы подводного плавания изложил Уильям Буэн в своем труде в 1578 году. Буэн на базе закона Архимеда впервые научно обосновывает способы всплытия и погружения при помощи изменения характеристик плавучести судна, изменяя его водоизмещение. По этим трудам удалось построить судно, способное погружаться и всплывать. Плыть под водой судно не могло.
Далее, в эпоху научно-технического прогресса, в Санкт-Петербурге тайным образом инженеры заложили принцип устройства подводной лодки, предназначенной для вооруженных сил. Она строилась по проектам Ефима Никонова. Проект осуществлялся с 1718 по 1721 год. Далее прототип спустили на воду, и он смог успешно пройти все испытания.
Через 50 лет в США построили первую подводную лодку, которая использовалась в ведении боевых действий. Корпус имел форму чечевицы из двух половинок, которые соединялись при помощи фланцев и кожаных вставок. На крыше была устроена полусфера из меди с люком. На лодке было балластное отделение, которое опорожнялось и заполнялось при помощи помпы. Имелся и аварийный балласт из свинца.
Первой серийной подводной лодкой стало судно Джевецкого. Серия составляла 50 штук. Затем конструкция была усовершенствована, и вместо весельного привода появился вначале пневматический, а затем и электропривод. Эти конструкции строили с 1882 по 1888 год.
Первой электрической субмариной стало судно разработки Клода Губэ. Прототип спустили на воду в 1888 году, судно имело водоизмещение в размере 31 тонны. Для передвижения использовался электрический двигатель мощностью 50 лошадиных сил. Питание осуществлялось от 9-тонной аккумуляторной батареи.
В 1900 году французские инженеры создали первую лодку с паровым и электрическим двигателем. Первый предназначался для движения над водой, второй – под ней. Конструкция была уникальна. Американское судно по подобию разработки французов работало на бензиновом двигателе для плавания над поверхностью воды.
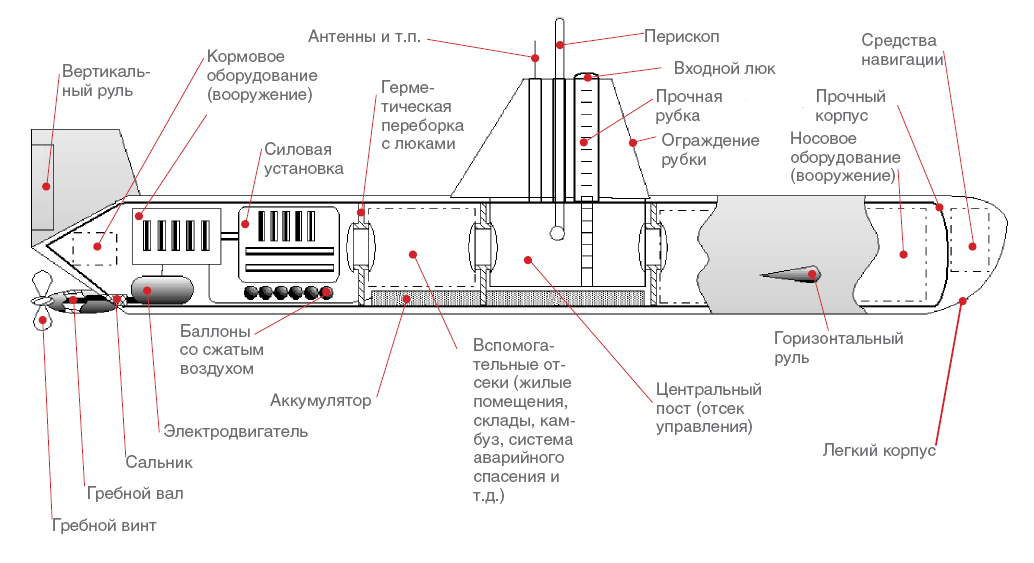
Устройство подводной лодки
Этому вопросу нужно уделить особое внимание. Давайте рассмотрим, как устроена подводная лодка. Она состоит из нескольких конструктивных элементов, выполняющих самые разные функции. Рассмотрим основные элементы.

Корпус
Главная задача корпуса – это полностью обеспечить постоянную внутреннюю среду для механизмов судна и для его экипажа в процессе погружения. Также корпус должен быть таким, чтобы достигалась максимально возможная скорость движения под водой. Это обеспечивается облегченным корпусом.
Типы корпусов
Подводные лодки, где корпус выполняет две эти задачи, называли однокорпусными. Цистерна главного балласта находилась внутри корпуса, что снижало полезный объем внутри и требовало максимальной прочности стенок. Лодка подобной конструкции выигрывает в весе, в необходимой мощности двигателя и в характеристиках маневренности.
Подводные лодки с полуторным корпусом оснащены прочным корпусом, который частично закрыт более легким. Цистерну главного балласта здесь вынесли наружу. Она находится между двумя корпусами. Среди плюсов – отличная маневренность и быстрая скорость погружения. Минусы – мало места внутри, малое время автономной работы.

Классические двухкорпусные лодки оснащаются прочным корпусом, который на всей своей протяженности закрыт легким корпусом. Главный балласт находится в промежутке между корпусами. Лодка обладает большой надежностью, временем автономной работы, большим внутренним объемом. Среди минусов – длительный процесс погружения, крупные размеры, сложность систем заполнения балластных цистерн.
Современные подходы к строительству подводных лодок диктуют оптимальные формы корпусов. Эволюция формы очень тесно связана с развитием систем двигателей. Изначально в приоритете были лодки для надводного перемещения с возможностью кратковременного погружения для решения боевых задач. Корпус тех субмарин имел классическую форму с заостренной носовой частью. Гидродинамическое сопротивление было очень высоким, но тогда оно не играло особой роли.
Современные лодки имеют значительно большую автономность и скорость хода, поэтому инженерам приходится снижать его – корпус делают в форме капли. Это оптимальная форма для движения под водой.
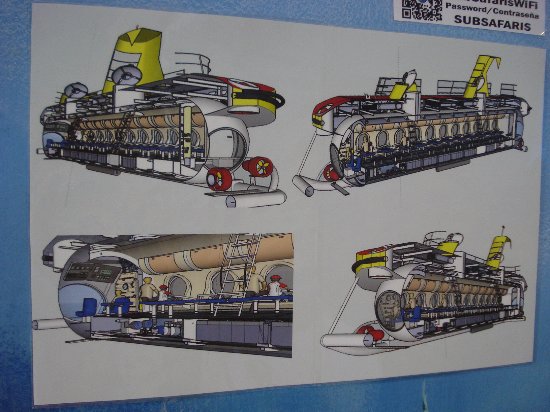
Моторы и АКБ
В устройстве современной подводной лодки для движения имеются аккумуляторы, электродвигатели и дизельные генераторы. Одного заряда аккумуляторов часто недостаточно. Максимум, на что хватает заряда – до четырех суток. На максимальной скорости АКБ подводной лодки разряжается за несколько часов. Подзарядку осуществляют дизельным генератором. Лодка обязательно должна всплывать, чтобы аккумуляторы зарядились.
Также в устройстве дизельной подводной лодки применялись анаэробные или воздухонезависимые двигатели. Им не нужен воздух. Лодка могла не всплывать.
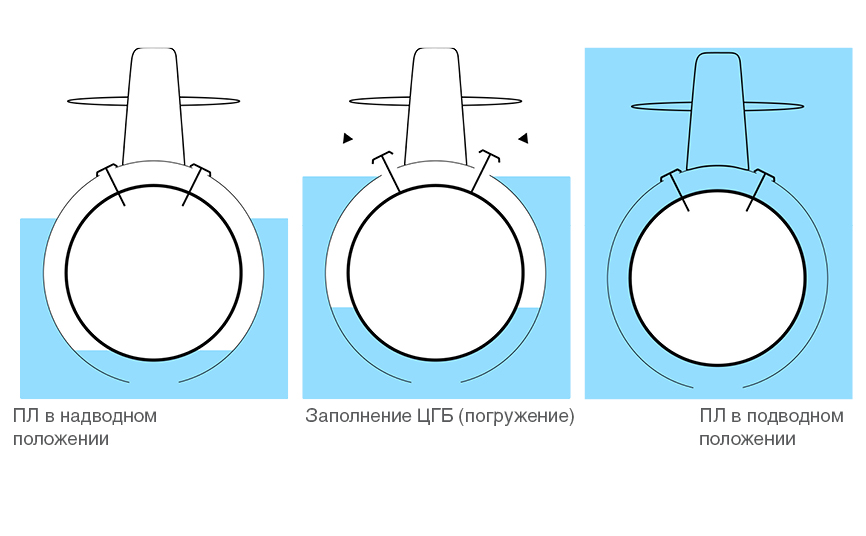
Системы для погружения и всплытия
В устройстве подводной лодки имеются и эти системы. Для погружения подводная лодка, в отличие от надводной, должна иметь отрицательную плавучесть. Этого достигали двумя способами – повышением веса или снижением водоизмещения. Для повышения веса в подводных лодках имеются балластные цистерны, которые заполняются водой либо воздухом.

Для обычного всплытия или погружения лодки применяют кормовые, а также носовые цистерны или цистерны главного балласта. Они нужны для заполнения водой в целях погружения и для заполнения воздухом для всплытия. Когда лодка находится под водой, цистерны заполнены.
Чтобы быстро и точно контролировать глубину, применяют цистерны с контролем глубины. Взгляните на фото устройства подводной лодки. Через изменение объема воды контролируют изменение глубины.

Чтобы управлять направлением лодки, применяются вертикальные рули. На современных машинах рули могут достигать огромных размеров.
Системы наблюдения
Одни из первых субмарин для небольшой глубины управлялись через иллюминаторы. Далее, по мере развития, встал вопрос об уверенной навигации и управлении. Впервые для этого в 1900 году применили перископ. В дальнейшем системы постоянно модернизировались. Сейчас перископы уже никто не использует, а их место заняли гидроакустические активные и пассивные сонары.
Лодка внутри
Во втором отсеке находятся офицерские и командирские каюты, рубка специалиста по гидроакустике и комната радиоразведчика.

Третий отсек представляет собой центральный пост. В данном отсеке масса различных приборов и устройств для управления движением, погружением, всплытием.
Четвертый представляет собой кают-компании для старшин, камбуз, радиорубку. В пятом отсеке находятся три дизельных двигателя мощностью 1900 л. с. каждый. Они работают, когда лодка находится над водой. В следующем отсеке находятся три электрических двигателя для подводного хода.
В седьмом установлены торпедные аппараты, прибор для стрельбы, койки личного состава. Можно посмотреть, как устроена подводная лодка внутри. Фото позволит ознакомиться со всеми приборами и отсеками.
Система погружения и всплытия подводной лодки включает в себя балластные и вспомогательные цистерны, а также соединительные трубопроводы и арматуру. Основной элемент здесь – это цистерны главного балласта, за счет заполнения водой которых погашается основной запас плавучести ПЛ. Все цистерны входят в носовую, кормовую и среднюю группы. Их можно заполнять и продувать по очереди или одновременно.
Атомные подлодки делят на поколения. Для первого (50-е) характерна относительно высокая шумность и несовершенство гидроакустических систем. Второе поколение строили в 60-е – 70-е годы: форма корпуса была оптимизирована, чтобы увеличить скорость. Лодки третьего больше, на них также появилось оборудование для радиоэлектронной борьбы. Для АПЛ четвертого поколения характерны беспрецедентно малый уровень шума и продвинутая электроника. Облик лодок пятого поколения прорабатывается в наши дни.
Важный компонент любой субмарины – воздушная система. Погружение, всплытие, удаление отходов – все это делается при помощи сжатого воздуха. Последний хранят под высоким давлением на борту ПЛ: так он занимает меньше места и позволяет аккумулировать больше энергии. Воздух высокого давления находится в специальных баллонах: как правило, за его количеством следит старший механик. Пополняются запасы сжатого воздуха при всплытии. Это долгая и трудоемкая процедура, требующая особого внимания. Чтобы экипажу лодки было чем дышать, на борту субмарины размещены установки регенерации воздуха, позволяющие получать кислород из забортной воды.
В целом, наблюдается тенденция к переходу на однокорпусные АПЛ, так как новейшая сталь, из которой выполнены корпуса американских лодок, позволяет выдерживать колоссальные нагрузки на глубине и обеспечивает субмарине высокий уровень живучести. Речь, в частности, идет о высокопрочной стали марки HY-80/100 с пределом текучести 56-84 кгс/мм. Очевидно, в будущем применят еще более совершенные материалы.
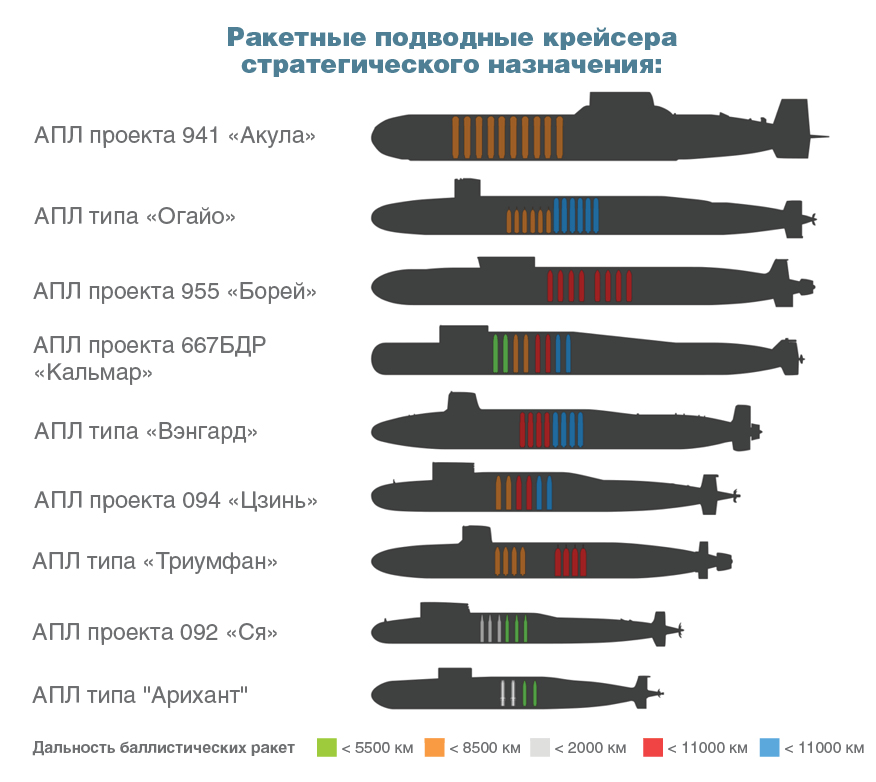
Существуют также лодки с корпусом смешанного типа (когда легкий корпус перекрывает основной лишь частично) и многокорпусные (несколько прочных корпусов внутри легкого). К последним относится отечественный подводный ракетный крейсер проекта 941 – самая большая атомная подлодка в мире. Внутри ее легкого корпуса находятся пять прочных корпусов, два из которых являются основными. Для изготовления прочных корпусов использовали титановые сплавы, а для легкого – стальной. Его покрывает нерезонансное противолокационное звукоизолирующее резиновое покрытие, весящее 800 тонн. Одно это покрытие весит больше, чем американская атомная подлодка NR-1. Проект 941 – воистину гигантская субмарина. Длина ее составляет 172, а ширина – 23 м. На борту несут службу 160 человек.

Первый отсек:
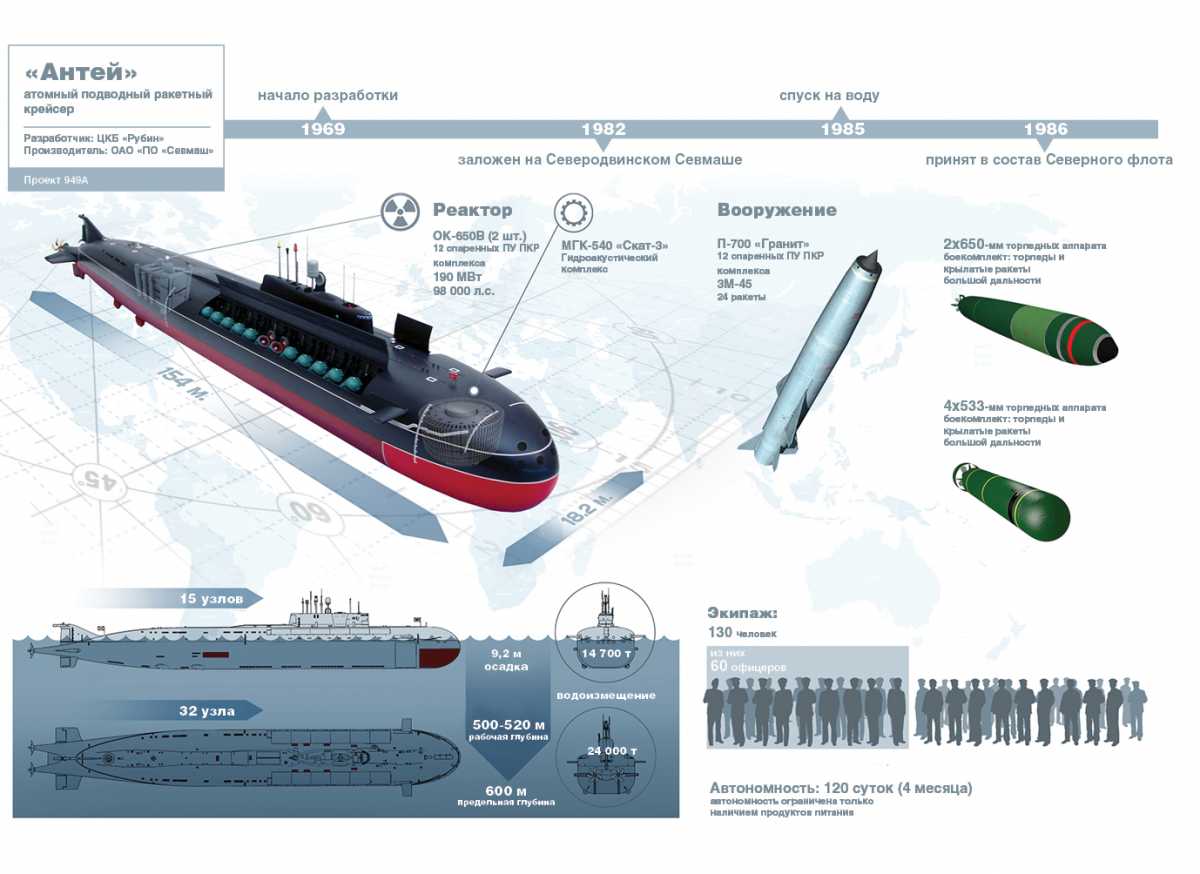
Его еще называют носовым или торпедным. Именно здесь расположены торпедные аппараты. Лодка имеет два торпедных аппарата 650-мм и четыре 533-мм, а всего на борту АПЛ находится 28 торпед. Первый отсек состоит из трех палуб. Боевой запас хранится на предназначенных для этого стеллажах, а торпеды подаются в аппарат с помощью специального механизма. Здесь также находятся аккумуляторные батареи, которые в целях безопасности отделены от торпед специальными настилами. В первом отсеке обычно служат пять членов экипажа.
Второй отсек:

Третий отсек:
Третьим является радиоэлектронный отсек. Здесь, в частности, находятся многопрофильные антенны связи и множество других систем. Аппаратура этого отсека позволяет принимать целеуказания, в том числе из космоса. После обработки полученная информация вводится в корабельную боевую информационно-управляющую систему. Добавим, что подводная лодка редко выходит на связь, чтобы не быть демаскированной.
Четвертый отсек:
Данный отсек – жилой. Тут экипаж не только спит, но и проводит свободное время. Имеются сауна, спортзал, душевые и общее помещение для совместного отдыха. В отсеке есть комната, позволяющая снять эмоциональную нагрузку – для этого, например, есть аквариум с рыбками. Кроме этого, в четвертом отсеке расположен камбуз, или, говоря простым языком, кухня АПЛ.
Пятый отсек:
Здесь находится вырабатывающий энергию дизель-генератор. Тут же можно видеть электролизную установку для регенерации воздуха, компрессоры высокого давления, щит берегового питания, запасы дизтоплива и масла.
5-бис:
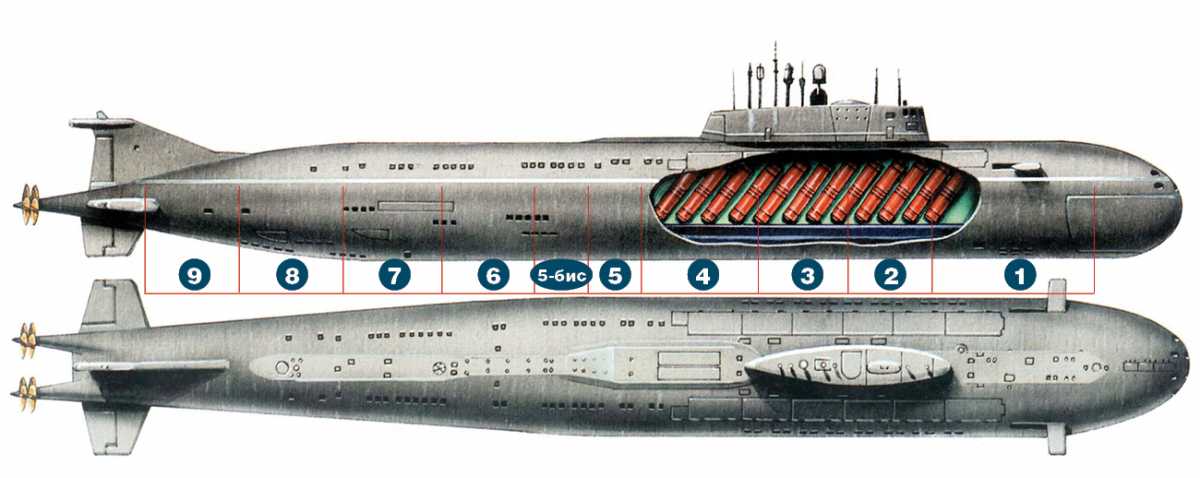
Это помещение нужно для деконтаминации членов экипажа, которые работали в отсеке с реакторами. Речь идет об удалении радиоактивных веществ с поверхностей и снижении уровня загрязнения радиоактивными веществами. Из-за того, что пятых отсека два, нередко происходит путаница: одни источники утверждают, что на АПЛ десять отсеков, другие говорят о девяти. Даже несмотря на то, что последним отсеком является девятый, всего на АПЛ (с учетом 5-бис) их имеется десять.
Шестой отсек:
Это отсек, можно сказать, находится в самом центре АПЛ. Он имеет особую важность, ведь именно здесь находятся два ядерных реактора ОК-650В мощностью по 190 МВт. Реактор относится к серии ОК-650 – это серия водо-водяных ядерных реакторов на тепловых нейтронах. Роль ядерного топлива исполняет высокообогащенная по 235-у изотопу двуокись урана. Отсек имеет объем 641 м³. Над реактором находятся два коридора, позволяющие попасть в другие части АПЛ.
Седьмой отсек:
Его также называют турбинным. Объем этого отсека составляет 1116 м³. Это помещение предназначено для главного распределительного щита; электростанции; пульта аварийного управления главной энергетической установкой; а также ряда других устройств, обеспечивающих движение подводной лодки.
Восьмой отсек:
Данный отсек очень похож на седьмой, и его тоже называют турбинным. Объем составляет 1072 м³. Здесь можно видеть электростанцию; турбины, которые приводят в движение винты АПЛ; турбогенератор, обеспечивающий лодку электроэнергией, и водоопреснительные установки.
Девятый отсек:
Это чрезвычайно малый отсек-убежище, объемом 542 м³, имеющий аварийный люк. Данный отсек в теории позволит выжить членам экипажа в случае катастрофы. Здесь есть шесть надувных плотов (каждый рассчитан на 20 человек), 120 противогазов и спасательные комплекты для индивидуального всплытия. Кроме этого, в отсеке расположены: гидравлика рулевой системы; компрессор воздуха высокого давления; станция управления электродвигателями; токарный станок; боевой пост резервного управления рулями; душевая и запас продуктов на шесть дней.

Ракеты находятся в специальных контейнерах между легкими и прочными корпусами АПЛ. Их расположение примерно соответствует центральным отсекам лодки: контейнеры с ракетами идут по обе стороны субмарины, по 12 на каждой из сторон. Все они повернуты вперед от вертикали на угол 40-45°. Каждый из таких контейнеров имеет специальную крышку, выдвигающуюся при ракетном запуске.
В военной сфере не только уставы писаны кровью, но и многие технические новации обязаны своим рождением трагическим событиям. Не так давно была завершена разработка уникального для отечественного кораблестроения комплекса — необходимость его создания стала очевидна морякам и инженерам после серии катастроф в подводном флоте.

Седьмого апреля 1970 года, завершив боевую службу в Средиземном море и выйдя в Атлантику, советская АПЛ К-8 проекта 627А взяла курс на свою северную базу. Неожиданно в ее третьем отсеке произошло возгорание химических патронов регенерации, предназначенных для очистки корабельной атмосферы. Потребовалось совсем немного времени, чтобы возгорание переросло в полномасштабный пожар. Как положено, сработала аварийная защита реакторов, остановились турбины. Резервный дизель-генератор запустить не удалось, и АПЛ осталась без электроэнергии, что существенно осложнило борьбу за живучесть, которая тем не менее продолжалась более трех суток. Продув балластные цистерны, лодка всплыла на поверхность. А пожар тем временем распространялся по кораблю. В двух кормовых отсеках прогорели забортные сальники (уплотнения выводимых из прочного корпуса лодки кабелей). В отсеки начала поступать вода, что привело к возникновению нарастающего отрицательного дифферента (наклона на корму). Через двое суток иссяк запас воздуха высокого давления, и сдерживать поступление воды в отсеки стало нечем. Корабль был обречен, надо было спасать экипаж. Подошедшие надводные корабли сняли часть моряков. А из центра продолжали поступать категорические приказы — до последнего бороться за спасение корабля. Утром 12 апреля процесс нарастания дифферента получил лавинообразный характер, и лодка, приняв почти вертикальное положение кормой вниз, стремительно пошла на дно, унеся с собой жизни 52 моряков.
Через 16 лет после этой трагедии вновь в водах Атлантики терпела бедствие другая советская АПЛ. Теперь это была К-219, стратегическая лодка, несущая в своих шахтах 16 баллистических ракет с ядерными зарядами. 16 октября 1986 года в находящейся на боевом дежурстве лодке возник пожар в ракетном отсеке. Причина пожара — разрушение ракеты с последующим нарушением герметичности шахты и попаданием в отсек компонентов ракетного топлива. Далее развитие катастрофы проходило по уже знакомому сценарию: распространение пожара по отсекам, прогорание забортных сальников, поступление в отсеки воды и, как следствие, нарастающий дифферент, приведший к утрате лодкой продольной остойчивости. После 15-часовой упорной, но безрезультатной борьбы за спасение корабля произошло его стремительное затопление. На этот раз учли печальный опыт К-8 и б? льшую часть экипажа своевременно переправили на подошедшие суда. На лодке оставались лишь девять человек во главе с командиром корабля. Пятерым из них удалось спастись, четверо вместе с АПЛ покоятся на дне океана на глубине около 5000 м.


К-219
На лодке произошел взрыв баллистической ракеты в одной из шахт. Через три дня, 6 октября 1986 года, лодка затонула в Атлантическом океане на глубине 5500 м. Б? льшая часть экипажа была спасена.

Об осадке и посадке
Здесь необходимо пояснить, почему этот процесс так опасен именно для подводных лодок. Одна из важнейших характеристик любых водоизмещающих судов — остойчивость, рассматриваемая как способность судна, выведенного внешним воздействием из положения равновесия, возвращаться в него после прекращения этого воздействия. Различают поперечную и продольную остойчивости, то есть способность к восстановлению равновесия после возникновения соответственно крена или дифферента. Подводная лодка, веретенообразный корпус которой имеет длину, существенно превышающую ширину, особенно чувствительна к дифферентам — отклонениям от горизонтального положения в продольном направлении. Когда лодка в движении, возникающие по тем или иным причинам дифференты погашаются действием ее горизонтальных гидродинамических рулей. Но на лодке, не имеющей хода, гидродинамические рули, естественно, не работают. Бороться с дифферентами можно лишь перемещением весовых нагрузок внутри корабля относительно его центра тяжести, уменьшая их со стороны, куда происходит наклонение, или увеличивая с обратной стороны, чтобы выровнять лодку. Реально эта процедура заключается в продувке одних и заполнению водой других балластных цистерн, размещенных в носу, корме и вдоль бортов АПЛ. Естественно, с какой бы стороны от центра тяжести ни увеличивался вес, это приводит к увеличению осадки корабля — третьему (наряду с креном и дифферентом) параметру, определяющему посадку корабля в море. Посадку, которую имеет исправный корабль на спокойной воде, называют равновесной. При этом полностью отсутствуют крен и дифферент, а осадка такова, что корабль погружен в воду по конструктивную (расчетную) ватерлинию. Когда ПЛ оказывается в надводном положении в штормовом море, волны, раскачивая ее, непрерывно изменяют все три параметра, определяющие посадку. Если ПЛ находится в нормальном (неповрежденном) состоянии и обладает необходимой остойчивостью, ее качания происходят относительно равновесного положения и не представляют опасности, если, конечно, не превысят критических значений. Совсем иная ситуация, когда в результате аварии и полученных повреждений ПЛ в надводном положении имеет посадку, отличную от равновесной, то есть когда даже при отсутствии морского волнения углы крена и дифферента корабля не равны нулю, а его осадка — не по конструктивную ватерлинию. Это обстоятельство необходимо непрерывно учитывать в ходе борьбы за живучесть аварийной ПЛ. Борясь с огнем путем затопления аварийных отсеков, выравнивая возникший крен или дифферент методом продувки балластных цистерн (особенно расположенных в носу или в корме лодки), следует представлять, как эти меры отражаются на изменении дифферента. Сделать это совсем непросто, поскольку субъективное восприятие может подвести, а объективной информации о реальном пространственном положении лодки получить неоткуда.
Математика стихии
Техническое задание подготовило одно из ЦКБ, проектировавших АПЛ. Опытно-конструкторская работа (ОКР) началась в 1993 году. Очень скоро стало ясно, что основная проблема заключается в отсутствии алгоритма, с помощью которого можно было бы определять параметры посадки корабля в условиях носящего случайный характер морского волнения. Поэтому именно с поиска алгоритма начиналась ОКР. К его разработке привлекались специалисты многих ведущих научных и проектных организаций судостроения и ВМФ. Совместно с ними были созданы и апробированы методами математического моделирования и экспериментально три варианта алгоритма. Один из них (алгоритм профессора Севастопольского приборостроительного института Ю.И. Нечаева) получил одобрение заказчика разработки — ЦНИИ кораблестроения — и был принят для использования в ОКР.
Алгоритм Нечаева разрабатывался путем анализа материалов экспериментов, проводимых с использованием радиоуправляемых моделей различных типов морских судов на естественном волнении. Затем он был апробирован на одном из кораблей Черноморского флота и на судах транспортного флота.
Принцип действия разработанного в соответствии с этим алгоритмом КПОРП основан на непрерывном контроле текущих значений трех параметров посадки корабля: углов крена и дифферента, а также осадки. Все эти параметры для аварийного корабля, находящегося в условиях морского волнения, носят случайный характер. Накопленные за определенный период данные по каждому из параметров проходят осреднения по времени, а затем полученные результаты дополняют вычисляемыми в соответствии с принятым алгоритмом поправками.


Чувствительные трубки
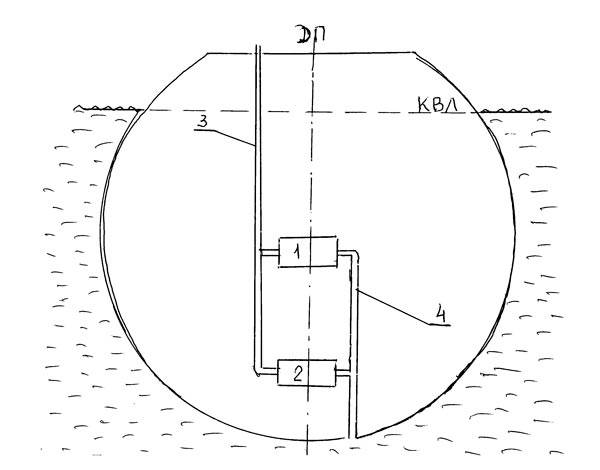
Реализация принятого КПОРП алгоритма ведется с помощью комплекта датчиков текущих значений крена, дифферента и осадки. Для измерений углов крена и дифферента были разработаны два максимально унифицированных друг с другом датчика, один из которых (кренометр) размещен в плоскости мидель-шпангоута (среднее поперечное сечение корпуса АПЛ), а второй (дифферентометр) — в диаметральной плоскости корабля. Принцип действия датчика основан на контроле давления или разрежения, возникающего во внутренней полости высокочувствительной мембранной коробки в результате наклонения связанной с этой полостью трубки, заполненной специальной незамерзающей жидкостью определенной плотности. Когда при крене (дифференте) корабля конец трубки оказывается выше мембранной коробки, в полости коробки возникает некоторое избыточное давление, пропорциональное длине трубки, помноженной на синус угла наклона, и удельному весу заполняющей трубку жидкости. При наклоне в противоположную сторону конец трубки опускается относительно мембранной коробки, отчего в ней возникает разрежение, пропорциональное тем же величинам. Для герметизации заполненной жидкостью полости, а также для компенсации теплового расширения жидкости служит эластичная диафрагма практически нулевой жесткости, установленная на конце трубки, противоположном мембранной коробке. Она же служит для компенсации колебаний давления воздуха в отсеке, одинаково воздействующего как снаружи на мембранную коробку, так и на эластичную диафрагму. При возникновении (вследствие наклонов) давления или разрежения в полости мембранной коробки она упруго прогибается, и ее центр перемещает в ту или иную сторону сердечник электрического преобразователя, на выходе которого возникает сигнал соответствующей полярности. Датчики крена и дифферента отличаются друг от друга лишь одним базовым размером — длиной заполненной жидкостью трубки, которая обратно пропорциональна синусу предельного значения контролируемого угла. В связи с тем, что предельные значения углов дифферента существенно меньше, чем крена, для получения одинакового сигнала на выходе обоих датчиков трубка датчика дифферента должна быть длиннее.
Измерение осадки осуществляется парой датчиков перепадов давления, динамическая полость которых связана с забортным пространством под днищем АПЛ, а статическая — с атмосферой. Используют два однотипных датчика перепада давления с разными пределами измерения, размещенные в одной плоскости и на одной вертикали, но в разных уровнях. В зависимости от фактического значения текущей осадки показания снимают с одного из датчиков (верхнего или нижнего), достигая требуемой точности измерения. При пересчете гидростатического давления в осадку в связанной с корпусом корабля системе координат учитываются текущие значения углов крена и дифферента.
В комплект приборов также входят блок вторичных преобразователей вышеназванных датчиков и информационно-вычислительный блок (ИВБ), представляющий собой мини-ЭВМ. Выходные данные поступают в ИВБ, который реализует введенный в его память алгоритм, а также обеспечивает внесение поправок в значения измеряемых параметров.
Образец КПОРП был изготовлен и прошел под наблюдением межведомственной комиссии многоэтапный цикл испытаний, включая проверки устойчивости ко всем видам механических и климатических воздействий, а также испытания на стенде многомерной угловой качки. При этом проверялась работоспособность КПОРП при раздельном и одновременном воздействии двух видов качки с заданием углов крена и дифферента, имитирующих аварийное положение корабля. Результаты испытаний подтвердили полное соответствие КПОРП требованиям ТЗ как по точности определения равновесных параметров посадки, так и по устойчивости ко всем видам корабельных воздействий.
Игра давлений
Вести постоянный автоматический контроль за посадкой подводного корабля помог комплекс оригинальных технических решений. Система датчиков реагирует на изменение давлений жидкости и воздуха.
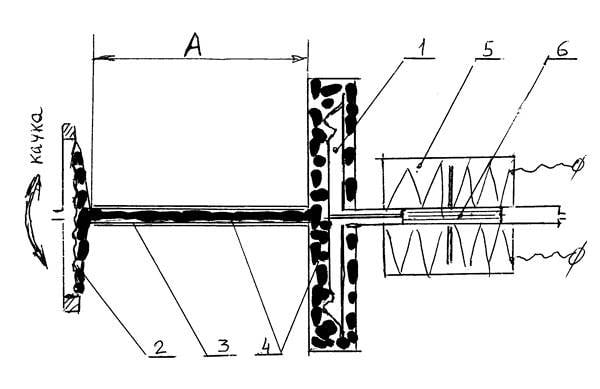
Принцип действия кренометра и дифферентометра основан на контроле давления, возникающего в мембранной коробке в результате наклонения заполненной жидкостью трубки.
Измерение осадки осуществляется парой датчиков перепадов давления, связанных с забортным пространством и атмосферой.
Читайте также: