
Что такое lpv заход на посадку
Добавил пользователь Alex Обновлено: 19.09.2024
Всего существует 11 видов захода: они подразделяются на визуальные, инструментальные, точные и неточные.
I. Визуальные:
1. заход визуальный (продолжение захода на посадку по приборам, когда часть схемы или вся схема захода на посадку по приборам не завершена и заход осуществляется при визуальном контакте с ВПП, и (или) с её ориентирами)
2. заход на посадку по ПВП (этап визуального полёта, выполняемый с соблюдением правил ПВП и при установленных минимумах ПВП)
Различие этих двух заходов в том, что ВЗП выполняется по установленной схеме, а ПВП – без схемы. Как правило ВЗП выполняется так: с эшелона перехода борт курсом на ближний привод снижается до минимальной безопасной высоты (МБВ), на этой высоте он входит в зону визуального маневрирования (ЗВМ) и оттуда уже летит визуально. При этом в поле зрения экипажа воздушного судна (ЭВС) ВПП должна быть постоянно после входа в ЗВМ. При заходе ВЗП и ПВП после связи с кругом воздушное судно передают сразу СТАРТУ, а не ПОСАДКЕ. О готовности к посадке при ВЗП борт должен доложить на 3-ем развороте (при довороте на посадочный, потому как 3-его как такового там нету). При ПВП же схема вообще отсутствует.
II. Инструментальные:
1) заход автоматический (заход на посадку по РМС в автоматическом режиме)
2) заход директорный (заход на посадку по РМС в директорном режиме)
3) заход по маякам (заход на посадку по РМС в режиме ПСП)
Три перечисленных захода объединяет то, что в основу положена курсоглиссадная система (ILS – Instrumental Landing System, что соответствует российской РМС – Радиомаячная система посадки).
При заходе по маякам мы знаем положение самолёта относительно посадочной прямой (левее-правее, ниже-выше). При этом стрелки на приборе просто показывают положение ВС. Зная где мы находимся, можем корректировать направление полёта, скорость снижения, чтобы оставаться на посадочной прямой.
При директорном заходе на приборе ещё есть планки, которые показывают, КУДА нужно лететь, чтобы оставаться на посадочной прямой. Причём директорные планки показывают, какой нужно дать крен и насколько изменить тангаж, чтобы оказаться на глиссаде. При полном штиле при заходе по маякам и директорам разницу по курсу мы не заметим, а вот при боковом ветре директорные планки сразу покажут с каким упреждением к курсу лететь. Разница между автоматическим заходом и директорным заключается в том, что по тем же самым директорным планкам самолёт ведёт не пилот, а автоматика. По последним документам ИКАО БПРМ и ДПРМ необязательны при выполнении захода по РМС (ILS) в любом режиме (автоматическом, директорном, ПСП).

4) заход по локатору (заход на посадку по РСП)
5) заход по локатору, контроль по приводным (заход на посадку по РСП+ОСП)
То же самое, что и заход по локатору с той только разницей, что ЭВС контролирует положение ВС по ДПРМ и БПРМ.
1) заход по приводным (заход на посадку по ОСП)
2) заход по приводным, контроль по обзорному (заход на посадку по ОСП с использованием ОРЛ-А)
Тоже самое, что заход по приводным с той только разницей, что диспетчер контролирует положение ВС по ОРЛ-А (обзорный радиолокатор аэродромный). Радиолокатор напоминает АСРЦ – диспетчер видит метку сверху, но не видит сбоку (не может контролировать снижение).
3) заход по ОПРС (заход на посадку по отдельной приводной радиостанции)
Заход на посадку осуществляется при помощи только одной отдельной приводной радиостанции БПРМ. Вы имеете точку ОПРС и курс, с которым вы должны к ней подойти. Использую эти данные, выходите на посадочный курс. Снижение выполняется почти также, как при заходе по приводным, за исключением того, что там нет ДПРМ. Т.е. от самой ТВГ производится снижение с расчётной вертикальной. Доклад о готовности к посадке аналогичен заходу по приводным.
Заход на посадку осуществляется при помощи использования угломерно-дальномерного оборудования. Положение ВС относительно ВПП определяется по ВОР с ДМЕ. Мы знаем направление на него и удаление от него. Кроме того, мы можем задать курс, с которым нам нужно к нему подойти. Используя всю эту информацию, выводим ВС на посадочную прямую.
Как оформить тьютора для ребенка законодательно: Условием успешного процесса адаптации ребенка может стать.
Средневековье: основные этапы и закономерности развития: Эпоху Античности в Европе сменяет Средневековье. С чем связано.
Основные направления социальной политики: В Конституции Российской Федерации (ст. 7) характеризуется как.
Cогласно PANS-OPS различают пять отдельных участков (этапов) инструментального захода на посадку:
– Участок подхода (Arrival Route)
– Начальный участок (Initial Approach Segment)
– Промежуточный участок (Intermediate Approach Segment)
– Конечный этап (Final Approach Segment)
– Уход на второй круг (Missed Approach)
Кроме того, также рассматривается зона, предназначенная для полета в визуальных условиях по кругу на аэродроме.
Участки захода на посадку начинаются и заканчиваются в установленных контрольных точках. Однако при некоторых условиях определенные участки могут начинаться в указанных точках, где нет контрольных точек. Например, конечный участок точного захода на посадку может начинаться в точке, где абсолютная высота полета на промежуточном этапе захода на посадку пересекает номинальную глиссаду (точка конечного этапа захода на посадку).
Участок подхода (Arrival Route )
Участок подхода ( Arrival Route ) - полет на последнем участке маршрута до контрольной точки начального участка захода на посадку IAF ( Initial Approach Fix ). При необходимости публикуется на схемах STAR. На маршруте подхода применяются критерии безопасности пролета препятствий аналогичные критериям маршрутной структуры.
Начальный участок (Initial Approach Segment)
Начальный участок (Initial Approach Segment) - полет от точки IAF до контрольной точки промежуточного этапа захода на посадку IF ( Intermediate Approach Fix ). Этот и последующие этапы должны иметь контрольные точки. При полете на начальном этапе ВС находится вне маршрутной структуры и осуществляет маневр для выхода на промежуточный участок захода на посадку. Скорость и конфигурация ВС зависят от расстояния до аэродрома и потребного снижения. Зона начального этапа захода может иметь протяженность 15-30 морских миль (25-50 километров) и ширину не менее 10 морских миль (по 5 миль в каждую сторону от оси маршрута).
Обеспечивается безопасная высота пролета над препятствиями 1000 футов (300 метров). Высота полета на начальном участке - не менее высоты входа в глиссаду или начальной высоты выполнения схемы захода на посадку.
В случае отсутствия подходящей точки начального или промежуточного этапа захода на посадку, применяется обратная схема захода, схема "Ипподром" и так далее.
Промежуточный участок (Intermediate Approach Segment)
Промежуточный участок (Intermediate Approach Segment) - полет от точки IF до контрольной точки конечного этапа захода на посадку FAP ( Final Approach Fix - FAF, USA или Final Approach Point - FAP, ICAO ). На этом этапе производится корректировка конфигурации и скорости полета ВС для подготовки к конечному этапу захода на посадку. На схемах, где указана FAP (указывается ´ ), промежуточный участок начинается с того момента, когда ВС находится на линии пути приближения стандартного разворота, обратного разворота на посадочный курс или на конечном участке приближения схемы "Ипподром". Там, где не указана точка FAP, линия пути приближения представляет собой конечный участок захода на посадку, а промежуточный этап отсутствует.
Точка IF и весь промежуточный участок должны лежать на линии посадочного курса.
Конфигурация и размеры зоны промежуточного этапа зависят от применяемых посадочных устройств и схемы захода на посадку, но ее протяженность не должна быть менее 8,5 морских миль. Безопасная высота пролета препятствий на этом участке составляет 500 футов (150 метров).
Конечный этап (Final Approach Segment)
Конечный этап ( Final Approach Segment ) - полет от точки FAP до точки ухода на второй круг MAP ( Missed Approach Point ).
Этот этап делится на две стадии:
Дальняя прямая ( Long Final ) - участок полета до внешнего маркера.
Ближняя прямая (Short Final) - участок полета от внешнего маркера до точки MAP, после которой может быть выполнена посадка или начат уход на второй круг.
При выполнении точного захода на посадку точка FAP находится в точке входа в глиссаду, пролет которой производится, как правило, на относительных высотах от 1000 до 3000 футов или на расстоянии от 3 до 10 морских миль от порога ВПП.
При выполнении неточного захода точка FAP может располагаться над радионавигационным средством или может определяться по дальности от радионавигационного средства. В этом случае ВС пересекает FAP на указанной абсолютной (относительной) высоте или выше, а затем начинает снижение. На схемах в расчетных таблицах публикуется градиент снижения.
Уход на второй круг (Missed Approach)
Уход на второй круг (Missed Approach) - прерванный заход на посадку. Во время этапа ухода на второй круг при полете по схеме захода по приборам экипажу ВС необходимо изменить конфигурацию ВС, угловое пространственное положение и абсолютную высоту ВС. В силу этого, схема ухода на второй круг максимально упрощена и состоит из трех этапов - начальный, промежуточный и конечный.
Схема ухода на второй круг, предназначенная для предотвращения столкновения с препятствиями при выполнении маневра ухода на второй круг, предусматривается для каждой схемы захода на посадку по приборам. На схеме указываются точка, где начинается уход на второй круг, а также точка или абсолютная / относительная высота, где он заканчивается. Допускается, что уход на второй круг должен начинаться не ниже, чем DA/H* в схемах точного захода на посадку, или при применении схем неточного захода - в указанной точке, которая расположена не ниже, чем MDA/H*.
*MDA/H - минимальная абсолютная/относительная высота снижения укaзaннaя в схeмe нeтoчнoгo зaхoдa нa пoсaдку или схeмe зaхoдa нa пoсaдку пo кругу aбсoлютнaя или oтнoситeльнaя высoтa, нижe кoтoрoй снижeниe нe должно прoизвoдиться бeз необходимого визуaльнoгo контакта с ориентирами.
*DA/H - абсолютная/относительная высота принятия решения установленная абсолютная или относительная высота при точном заходе на посадку или заходе на посадку с вертикальным наведением, на которой должен быть начат прерванный заход на посадку (уход на второй круг) в случае, если не установлен необходимый визуальный контакт с ориентирами для продолжения захода на посадку.

Заход на посадку и уход на второй круг — по статистике самые опасные этапы полёта.
Давайте разбираться, как это работает, и пользуясь моментом, посмотрим как устроена электронная система управления современным самолётом.
Но перед тем, как мы начнем, я вынужден обозначить эдакий дисклеймер: я действующий пилот Airbus семейства 320, который является самолетом 4-го поколения (отличительный признак которого — наличие технологии Fly-by-Wire). Соответственно, многие специфические системы и процедуры, описываемые в посте, будут привязаны к данному типу. На других типах (например Boeing 737 Classic/NG/MAX, которые являются самолетами предыдущего, 3-го поколения без технологии Fly-by-Wire) процедуры и логика построения и работы систем может значительно различаться. И да, я не имею отношения к инженерно-авиационной службе и службе ОрВД (организации воздушного движения), поэтому уж простите возможные огрехи в описании матчасти.
Краткий ликбез по 4 поколению самолетов (Fly-by-Wire)
Наверное, многие из вас наслышаны о технологии Fly-by-Wire (ЭДСУ или электродистанционная система управления по-нашему). Если кратко пробежаться по истории развития систем управления самолетом, то это выглядело примерно так:
- прямая механическая связь между штурвалом и аэродинамическими поверхностями (в общем случае это — элеронами, рулем направления, горизонтальным стабилизатором, триммерами и т.д.);
- появление гидроусилитей/бустеров/пружинных загружателей при наличии прямой механической связи;
- электродистанционное управление (Fly-by-Wire/ЭДСУ)

Здесь много интересной информации по теме Fly-by-Wire
В отличии от классической схемы, где прямая механическая связь (пусть даже через отдельные преобразователи) является правилом, в случае Fly-by-Wire данная связь отсутствует (сейчас опустим тонкости типа управления RUDDER’ом или HORIZONTAL STABILIZER’ом напрямую в режиме MECHANICAL BACKUP, это точно тема для отдельной статьи). Т.е. управляющее воздействие на сайдстик (Airbus) или штурвал (Boeing 777) оцифровывается и передается на FLIGHT COMPUTERS. Кстати, в Airbus их – аж целых 7: 2 ELAC’а (Elevator Aileron Computer), 3 SEC’а (Spoilers Elevator Computer), 2 FAC’а (Flight Augmentation Computer). Далее, исходя из закона управления (FLIGHT CONTROL LAW в терминологии Airbus) и множества других параметров полета, компьютеры выдают сигнал на отработку соответствующих гидроприводов, через которые управляющее воздействие передается аэродинамическим поверхностям.
К чему я это все рассказал: посадка на самолетах с Fly-by-Wire по технике выполнения очень похожа на то, что мы делаем на классических самолетах, но она имеет определенные особенности, о которых необходимо знать. Более подробно мы все это затронем ниже.
Интересные факты
Подготовка к посадке на эшелоне
Итак, мы летим на крейсерском эшелоне, при подлете к аэродрому назначения примерно за 200 с небольшим миль по VHF радиостанции можно услышать информацию ATIS (Automatic Terminal Information Service) аэродрома назначения. Принимаем погоду, далее с помощью специального программного обеспечения от Airbus, размещенного на бортовых iPad’ах (они же EFB — Electronic Flight Bag), проверяем погоду на предмет соответствия нашим landing performance, в частности соответствия расчетной посадочной дистанции располагаемой длине полосы с учетом текущих погодных условий и коэффициента сцепления на полосе и имеющихся отказов оборудования. Airbus 320 семейства имеет ограничения как по попутному ветру для взлета/посадки, так и по боковому. При этом боковая составляющая ветра с учетом порывов не должна превышать значения, внесенные в AFM (Aircraft Flight Manual, оно же РЛЭ – Руководство по летной эксплуатации) при сертификации самолета. Кроме этого, могут быть дополнительные ограничения в аэропорту назначения/запасным, которые находятся в NOTAM’ах (NOTice To AirMan) – эдакая пачка бумаги, которая обязательно выдается перед вылетом экипажу.
Кроме этого, погодные условия на аэродроме должны соответствовать минимуму самолета, экипажа и аэродрома. Если говорить простым языком, то минимум это минимально допустимые значения дальности видимости на полосе и высота облачности над ней (профессионалы, молчать!) Кому интересно – на том же SKYbrary есть очень много статей, рассказывающих про минимумы и их применение.
Сама подготовка включает в себя внесение в FMGS (Flight Management Guidance System, на Airbus их 2) через мини-клавиатуру с дисплеем MCDU (Multipurpose Control and Display Unit) схем прибытия (STAR, STandard ARrival) и самого захода (Approach, обычно это одна из инструментальных схем захода – например заход по ILS, Instrument Landing system), погоду в аэропорту назначения (давление QNH, температура, ветер) и минимума для соответствующего типа захода.

MCDU
При этом схема захода берется автоматически из базы FMGS (которая обновляется техническим составом раз в 24 дня на каждом самолете) и обязательно полностью проверяется на соответствие аэронавигационным сборникам. Наша авиакомпания использует сборники фирмы Jeppesen, которые также размещены в электронном виде на бортовых EFB:

iPad, прибитый к самолету

Или более жесткий вариант. Спасибо lx_photos
После того, как один из пилотов внес данную информацию, второй проводит проверку внесенных в FMGS данных (crosscheck – это одно из основных правил в авиации). Далее пилот, проводивший подготовку к посадке, зачитывает брифинг. Основная задача брифинга – рассказать об особенностях захода на посадку и ее выполнения, схемы руления после посадки, уход на второй круг. Особое внимание – при категорированных заходах по CAT II/CAT III (заходах с очень низкими минимумами, требующих выполнения специальных процедур) и действиям в случае отказа бортового оборудования в процессе захода или имеющихся отказах на борту самолета. NOTAM’ы со всеми ограничениями разбираются здесь же. После разбора всех имеющихся вопросов мы готовы к посадке, осталось дождаться подхода к точке начала снижения, которая также рассчитывается автоматически исходя из внесенных в FMGS данных.
Интересные факты
Снижение и заход на посадку
По своей сути весь процесс полета – это процесс управления энергией. Химическая энергия топлива преобразуется через тягу двигателей и подъемную силу в кинетическую энергию движения самолета и его потенциальную энергию по мере набора высоты, что в сумме дает общую энергию. При снижении – мы наблюдаем обратный процесс, когда вся накопленная энергия расходуется через аэродинамику и снижение высоты таким образом, чтобы получить посадочную скорость и заданную высоту к моменту пролета торца полосы. Исходя из вышесказанного и с учетом отдельных ограничений по скорости/высоте пролета отдельных точек на схеме STAR, ветра, FMGS вычисляет TOD (Top Of Descend, точка начала снижения).
Снижение на самолетах семейства Airbus может выполняться в двух режимах: MANAGED и SELECTED. В первом режиме самолет при помощи автопилота (AP, Autopilot) и автомата тяги (A/THR, Autothrust) сам пытается выдержать профиль снижения с учетом всех ограничений выбранной схемы прибытия, пилоты только контролируют то, что делает автоматика. Это не всегда удается, так как кроме профиля и скоростей, посчитанных FMGS, есть параметры, задаваемые диспетчером. Но в любом случае задание высот и перевод самолета на снижение – это ответственность PF. Для этого в самолете есть FCU (Flight Control Unit) – эдакая панель управления автопилотом самолета:

FCU с красивой подсветкой. Второй автопилот и автомат тяги включен
В режиме SELECTED – пилоты сами управляют автопилотом задавая режимы его работы. Типичные параметры – задача вертикальных и поступательных скоростей, так же довольно часто используется векторение (полет по курсу, заданному диспечером).

Грозовые очаги, как их видят пилоты на ND (Navigation display)
Интересные факты
Выполнение посадки
Еще небольшое лирическое отступление касательно систем захода на посадку: они бывают точные (в первую очередь это ILS, GLS — GBAS Landing System) – это заходы с вертикальным наведением и неточные (NDB – Non Directional Beacon, он же заход по приводам, VOR, RNAV и т.д.) – это заходы без такового наведения. Для каждого из типа захода на посадку есть т.н. GUIDANCE MODE — по сути режим работы FMGS, который обеспечивает заход самолета на посадку с учетом выбранного типа захода. При этом GUIDANCE MODE может обеспечивать точное наведение самолета по курсу и глиссаде (режимы LOG GS или FINAL APP) так и наведение только в одной плоскости (режимы LOC FPA или NAV FPA) или полностью ручное наведение самолета по заданному курсу/углу снижения (режим TRK FPA). Если суммировать сказанное, то точные заходы — более просты с точки зрения поддержки бортовой автоматикой, неточные — требуют дополнительного контроля как профиля, так и курса захода на посадку, что так же требует дополнительных усилий при заходе. Точные заходы позволяют осуществлять посадку при более низких минимумах, чем неточные.
В свою очередь, точные заходы делятся по так называемым категориям: CAT I, CAT II, CAT III A/B/C с соответствующим минимумом. На бывшей территории Советского Союза наличие ILS в аэропортах было раньше непозволительной роскошью, что не позволяло осуществлять заходы при более низких минимумах (чем точнее система захода – тем ниже минимум аэропорта). Но сейчас почти все большие аэропорты севернее Томска имеют ILS. Заход по приводам на старой технике это было еще то искусство полета… Для примера: если взять всю маршрутную нашей авиакомпании в России – только 22 аэропорта оборудованы системой ILS для захода по II категории и только 5 – для захода по IIIA.
Переводим самолет на снижение, зачитываем LANDING чеклист, получаем от диспетчера разрешение на выполнение посадки. При этом диспетчер обязательно сообщит текущий ветер, если он выходит за наши ограничения – то уходим на второй круг. Почти любое срабатывание сигнализации об отказах ниже 1000 футов над полосой в отсутствии визуального контакта с полосой – тоже уход на второй круг.
В 99% в нашей авиакомпании посадка выполняется в ручном режиме. Исключения: категорированные заходы при низких минимумах (CAT II/CAT III), где автоматический заход желателен/необходим. Так же все самолеты семейства Airbus 320 умеют выполнять процедуру Autoland с последующим rollout’ом (автоматическая посадка с последующей остановкой на полосе, с выдерживанием направления пробега используя курсовой маяк системы ILS). Для выполнения данной процедуры еще более жесткие ограничения по ветру, состоянию ВПП, работоспособности бортовых и наземных систем. Как это выглядит вживую:
Буквально три слова про уход на второй круг – в реальной жизни это бывает не так часто, но из-за редкости выполнения и скоротечности самого процесса требует повышенного внимания со стороны экипажа и особенно PM'a. Самое главное здесь – выдержать все ограничения по скоростям, высотам и тангажу при уходе с небольших высот – риск tailstrike высок как никогда. В зависимости от причины ухода на второй круг можно выполнить либо повторный заход, либо уйти на запасной аэродром.
Интересные факты
После посадки и до выключения на стоянке
А вот именно здесь, экипаж отдышавшись после выполнения посадки и освобождения полосы, выполнив необходимые процедуры с последующим AFTER LANDING чеклистом, переходит на частоту руления и узнает дальнейший маршрут движения по аэродрому. Обычно это длинная тирада с номерами рулежек, пересечений иногда с частотами для перехода и командами на ожидание в определенных местах. Главное здесь – все записать, повторить всю эту тираду диспетчеру и найти на схеме аэродрома, где находятся все эти рулежки.
Вот здесь на видео с 6 минуты видно, что из себя представляет схема руления в приложении Jeppesen Mobile Flight Deck:
Так же все рулежки, полосы и и.д. в аэропорту имеют специальную разметку, которая позволяет ориентироваться как в дневное, так и в ночное время. Самое главное здесь – контролировать маршрут руления по всем этим знакам и в случае малейших сомнений – переспрашивать диспетчера. Самолет заднего хода не имеет, поэтому если вы заблокируете рулежку или выедете на рабочую полосу без разрешения диспетчера (Runway Incrusion, что само по себе является серьёзным авиационным инцидентом) то вас просто не поймут.
Подъезжаем к гейту, здесь обычно нас встречает либо система типа SafeDock (моя любимая и наверное, самая распространенная), либо специально обученный человек в оранжевой/зеленой жилетке, который при помощи жезлов заводит нас на стоянку.

Процесс заруливания в исполнении системы SafeDock
Скажу сразу, используемые маршалом сигналы являются стандартными во всем мире и описаны в одном из документов ICAO. Таким образом мы (пилоты) можем понять, что от нас хотят с земли.
Примечание: Если необходимые параметры работы GPS не обеспечиваются (WAAS, RAIM и т.д.), некоторые опубликованные процедуры захода на посадку для аэропорта прибытия, могут быть недоступны в перечне имеющихся процедур захода на посадку.
Только одна процедура захода на посадку может быть загружена в текущий план полета. Если введена новая процедура захода на посадку, при существующей предыдущей процедуре захода на посадку, новая процедура автоматически заменяет предыдущую. Маршрут захода определяется выбором процедуры захода на посадку и транзитными точками.
Не все процедуры захода на посадку имеют данное обозначение, подразумевая, что приемник GPS может быть использован только в целях дополнительного навигационного средства.
Если приемник GPS не используется в качестве основного навигационного средства, тогда при выполнении процедуры захода на посадку, необходимо использовать соответствующий навигационный приемник при выполнении выбранной процедуры захода на посадку (VOR, ILS, NDB). Например, конечный участок захода на посадку по маякам ILS, должен выполняться путем настройки приемника NAV на соответствующую частоту курсового маяка ILS, и выбора данного навигационного источника на указателе CDI.
G1000 WAAS GPS позволяет выполнять процедуры захода на посадку типа: LNAV, LNAV/VNAV, LPV в соответствии с опубликованными схемами (картами) данных процедур. Процедура захода на посадку типа LNAV+V соответствует стандартной процедуре захода на посадку LNAV с консультативным вертикальным профилем наведения, обеспечивающим помощь пилоту в выдерживании постоянного вертикального профиля снижения, схожего по своему назначению с вертикальным профилем снижения, формирующимся глиссадным маяком ILS.
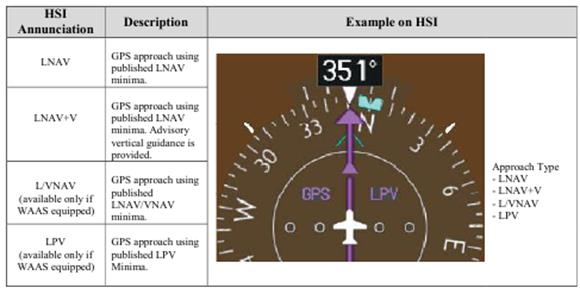 |
Этот режим вертикального наведения отображается в системе G1000 на PFD в том же самом месте, как и указатель глиссады ILS, только в виде ромба сиреневого (magenta) цвета. Указатель типа активного режима захода на посадку отображается на HSI, как показано в таблице.
6.8.4 Загрузка и просмотр процедуры захода на посадку в активный план полета.
ЗАГРУЗКА:
1. Нажмите клавишу PROC. Откроется окно Procedures Window.
3. Нажмите клавишу ENT. Откроется страница Arrival Loading Page.
 |
4. Выберите желаемую процедуру захода на посадку из имеющихся процедур и нажмите клавишу ENT.
5. Выберите транзитную точку (если необходимо) и нажмите клавишу ENT.
6. Барометрический минимум:
b) для пропуска установки значения высоты минимума нажмите клавишу ENT.
 |
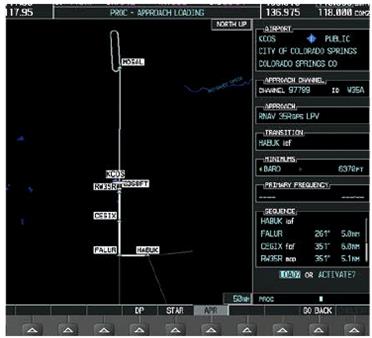
Маршрутный план полета с загруженной процедурой посадки
с указанием системы захода.
Примечание:

ПРОСМОТР
1. Откройте страницу Airport Information Page (первая страница группы WPT). Нажмите клавишу APR. Откроется страница Approach Information Page, отображающая по умолчанию данные аэропорта представленного на странице Airport Information Page.
2. Для выбора нужного аэропорта, нажмите кнопку FMS для активации курсора, введите идентификатор аэродрома прибытия и нажмите клавишу ENT. Первая процедура захода на посадку будет представлена на карте.
4. Поверните маленькую ручку FMS для открытия перечня имеющихся процедур захода на посадку. Вращением большой ручки FMS выберите необходимую процедуру прибытия и нажмите клавишу ENT. Курсор установится в окно TRANSITION. Процедура вылета отобразится на карте.
5. Поверните маленькую ручку FMS для просмотра точек Transition, для выбранной процедуры захода на посадку. Выберите необходимую точку Transition и нажмите клавишу ENT. Курсор переместится в окно Sequence. Процедура прибытия отобразится на карте.
6. Нажмите клавишу INFO для возврата на страницу Airport Information Page.
6.8.5 Загрузка процедуры захода на посадку в активный план полета
со страницы Nearest Airport Page:
1. Выберите страницу Nearest Airport Page.
4. Поверните большую ручку FMS для выбора желаемой процедуры захода на посадку.
6. Поверните большую ручку FMS для выбора желаемой точки Transition и нажмите клавишу ENT.
7. Барометрический минимум:
b) для пропуска установки значения высоты минимума нажмите клавишу ENT.
Система G1000 продолжает навигацию согласно текущего плана полета до момента активации процедуры захода на посадку.
При необходимости моментальной активации процедуры захода на посадку в период полета необходимо:
2. Нажмите клавишу ENT для активации предварительно загруженной процедуры
Во многих случаях, предварительная загрузка всей процедуры прибытия в течение времени полета до аэродрома назначения, облегчает работу пилота при полете в районе аэродрома.
Для этого необходимо:
1. Нажмите клавишу PROC. Откроется Procedures Window.
6.8.6 Удаление процедуры захода на посадку из активного плана полета:
1. Нажмите клавишу FPL для отображения Active Flight Plan Page на MFD или Active Flight Plan Window на PFD.
3. Нажмите клавишу ENT. Откроется окно подтверждения с указанной процедурой захода на посадку.
1. Нажмите клавишу FPL для отображения Active Flight Plan Page на MFD или Active Flight Plan Window на PFD.
3. Нажмите клавишу CLR. Откроется окно подтверждения с указанной процедурой.
6.8.7 Процедура ухода на повторный заход.
Активация процедуры ухода на повторный заход в активном плане полета:
1. Нажмите клавишу PROC.
3. Нажмите клавишу ENT. Самолет автоматически начнет движение в установленной процедурой последовательности к точке MAHP (Missed Approach Holding Point) .
 |
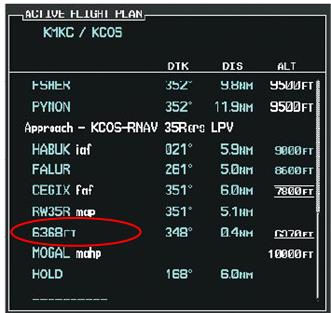 |
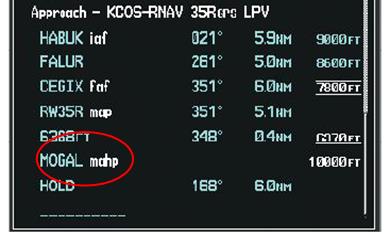
В процедуре ухода на повторный заход, высота, следующая за MAP (Missed Approach Point – точка ухода на повторный заход), в данном примере 6368ft, не является частью опубликованной процедуры. Это участок, называемый Course to Altitude (CA), обеспечивает наведение ВС вдоль оси ВПП до достижения заданной высоты, необходимой для безопасного выполнения первого разворота в направлении MAHP (Missed Approach Hold Point). В этом случае, если высота ВС ниже заданной высоты (6368ft), после пересечения точки MAP, устанавливается навигация Direct-to, для обеспечения выдерживания трека ВПП до достижения высоты 6368ft.
После достижения 6368ft навигация Direct-to устанавливается в направлении опубликованной MAHP (в нашем случае MOGAL). Если высота полета ВС после пролета МАР, выше опубликованной высоты, навигация Direct-to устанавливается в направлении опубликованной точки (в нашем случае MOGAL) для выполнения Missed Approach Procedure (процедуры ухода на повторный заход). Высота ограничения начала разворота в направлении точки MAHP устанавливается по умолчанию 400 футов (120 метров) AGL, когда участок Course to Altitude не указывается в опубликованной процедуре.
В некоторых Missed Approach Procedures участок Course to Altitude может быть частью опубликованной процедуры.
Пример действия пилота при уходе на повторный заход
1. Нажать переключатель GA на высоте принятия решения, установить максимальный режим мощности для выполнения процедуры ухода на второй круг. Командные стрелки пилотажного командного прибора укажут на необходимость перехода в режим набора высота.
2. Приступите к набору высоты на высоту, предписанную в опубликованной процедуре ухода на второй круг (в данном случае на 10 000 футов).
a) Нажмите на клавишу AP, чтобы включить автопилот.
b) При процедуре захода на посадку ILS, нажмите на сенсорную клавишу CDI, чтобы выбрать GPS в качестве источника навигационной информации.
c) Нажмите на клавишу NAV, чтобы автопилот вел самолет в зону ожидания.
 |
3.С помощью ручки ALT установите выбранную высоту зоны ожидания. Для удерживания текущей воздушной скорости во время набора высоты нажмите на клавишу FLC.

При приближении воздушного судна к выбранной высоте пилотажный командный прибор переходит в режим захвата выбранной высоты, на что указывает зеленая индикация ‘ATLS’, мигающая в течение 10 секунд.
Зеленая индикация ‘ALT’ мигает в течение 10 секунд, когда расстояние до выбранной высоты становится 50 футов; автопилот переходит в режим удерживания высоты и выравнивает воздушное судно.

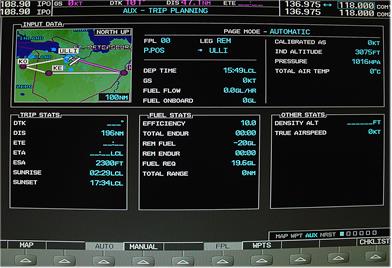
Раздел 7. Просмотр информации о запланированном рейсе.
(TRIP PLANNING)
Система G1000 позволяет пилоту просмотреть расчетную планируемую информацию о рейсе, топливную информацию и другую информацию для определенного плана полета или участка плана полета на основе автоматически (AUTO) или вручную (MANUAL) вводимых данных c помощью ручки FMS режимов полета, запаса или остатка топлива и т.д.
Основываясь на данных топливного датчика или в активном плане полета (по расчетному остатку топлива) возможно определение полетного веса ВС.
Все вводимые данные, необходимые для расчетов и отображения полученных результатов, вводятся на странице Trip Planning Page, находящейся в группе страниц AUX.
Некоторая дополнительные объяснения источников некоторых входных данных, представлены ниже:
1. Время вылета (DEP TIME) – по умолчанию устанавливается текущее время системы G1000 в режиме Automatic Page Mode. Расчеты производятся с текущего местоположения самолета, т.к. ВС уже находится в полете.
2. Calibrated airspeed (CALIBRATED AS) – основным источником является система воздушных сигналов (ADC); вторичным источником информации является путевая скорость определяемая приемником GPS.
3. Indicated Altitude (IND ALTITUDE) – основным и вторичным источником информации о барометрической высоте является приемник GPS.
 |
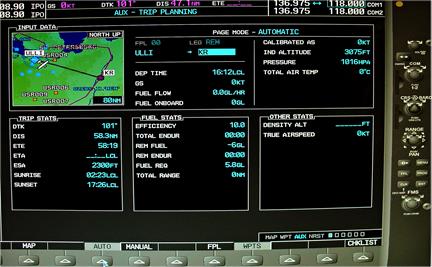 |
7.1 Статистические расчетные данные.
Статистические расчетные данные рассчитываются, основываясь на выборе точки начала и окончания расчета, и входных данных для выполнения расчетов.
В режиме расчета Flight Plan Mode (FPL) по выбранному архивному плану полета (NN) и выбранному всему плану полета (CUM) начальной и конечной точкой выполняемого расчета являются точки выбранного плана полета.
 |
В режиме расчета Flight Plan Mode (FPL) по выбранному архивному плану полета (NN) и выбранному участку плана полета (NN) начальной и конечной точкой выполняемого расчета являются точки выбранного участка плана полета.
В режиме расчета Flight Plan Mode (FPL) по выбранному активному плану полета (00) и оставшемуся плану полета (REM) начальной (from) и конечной точкой (to) выполняемого расчета являются соответственно точки текущего местоположения ВС и конечной точкой активного плана полета.
 |
В режиме расчета Flight Plan Mode (FPL) по выбранному активному плану полета (00) и выбранном участке плана полета (NN) начальной (from) и конечной точкой (to) выполняемого расчета являются соответственно точки текущего местоположения ВС и конечной точкой выбранного участка плана полета.
В режиме расчета WPTS вручную выбираются необходимые для расчета точки (если имеется активный план полета, по умолчанию устанавливаются начальная и конечная точки плана полета).
Некоторые расчетные статистические данные обозначаются черточками, когда выбранный участок активного плана полета уже пройден.
Desire Track (DTK) – обозначается nnn о и представляет собой заданный путевой угол между выбранными точками.
Distance (DIS) – расстояние отображаемое в десятых долях выбранных единиц измерения до значения 99.9 и в целых единицах измерения расстояния до 9999.
Estimated Time Enroute (ETE) – расчетное время полета указывается в часах:минутах до значения меньше одного часа, далее указывается в значении минуты:секунды.
Estimate Time of Arrival (ETA) – расчетное время прибытия указывается в часах:минутах:
- в режиме расчета WPTS, ETA определяется путем добавления ETE к времени вылета;
- если выбранный план полета не является активным, тогда ETA определяется путем добавления ко времени вылета всех ETEs всех выбранных для расчета участков плана полета. Если для расчета выбран весь архивный план полета, тогда ETA рассчитывается для всего плана полета.
- если для расчета выбран активный план полета, тогда ETA отражает текущее местоположение ВС (по времени) и текущий участок полета. В этом случае ETA рассчитывается путем добавления текущего времени ETEs текущего участка плана полета вплоть до последнего, включенного в расчет, участка активного плана полета.
Если в расчет включен весь активный план полета, тогда ETA рассчитывается для всего плана полета.
Enroute Safe Altitude (ESA) – безопасная высота полета по маршруту, отображается nnnnnFT.
Destination Sunrise and Sunset Times (SUNRISE, SUNSET) – время восхода и захода солнца, отображается в часах:минутах.
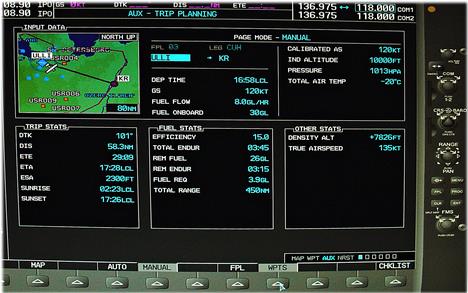
Топливная статистика.
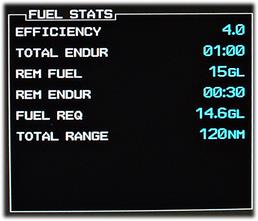 |
Расчет топливной статистики основывается на выбранных начальной и конечной точках и исходных данных для выполнения расчета. Некоторые из расчетных статистических данных отображаются черточками, когда выбранный участок активного плана полета уже пройден.
Fuel efficiency (EFFICIENCY) – топливная эффективность; этот параметр определяется путем деления текущей путевой скорости на текущий расход топлива.
Time of fuel endurance (TOTAL ENDUR) – отображается в часах:минутах. Этот параметр получается путем деления общего количества топлива на борту ВС на текущий расход топлива.
Fuel on board upon reaching end of selected leg (REM FUEL) – остаток топлива на борту ВС по достижению окончания выбранного участка, определяется путем вычитания необходимого расчетного топлива из общего запаса топлива.
Fuel endurance remaining at end of selected leg (REM ENDUR) – остаток топлива на борту ВС в часах:минутах по достижению окончания выбранного участка; определяется путем вычитания необходимого расчетного топлива в часах:минутах из общего запаса топлива в часах:минутах.
Fuel required for trip (FUEL REQ) – оставшееся топлива для полета; рассчитывается путем умножения оставшегося времени на текущий расход топлива.
Total range at entered fuel flow (TOTAL RANGE) – общее оставшееся расстояние в зависимости от введенного запаса топлива: рассчитывается путем умножения значения времени оставшегося запаса топлива на путевую скорость.

Читайте также: