
Заход на посадку по ndb
Добавил пользователь Morpheus Обновлено: 19.09.2024
Заходы на посадку с использованием бокового наведения, но без использования вертикального наведения. Неточный заход - инструментальный заход на посадку, при котором электронная глиссада снижения, формируемая соответствующими посадочными устройствами, отсутствует (заход по LOC, VOR, VORTAC, NDB и так далее).
К неточным системам посадки относятся:
- ОСП (оборудование системы посадки) — комплекс из двух приводных радиостанций (ПРС), включающий в себя для каждого курса посадки по две ПРС — дальний приводной радиомаяк (ДПРМ), приблизительно в 4000 м от торца ВПП, и ближний приводной радиомаяк (БПРМ), приблизительно в 1000 м от торца ВПП. Каждое направление посадки имеет особенные позывные ДПРМ и БПРМ; как правило, однобуквенный позывной БПРМ — первая буква позывного парного ДПРМ.
- ОСП+ОРЛ-А — оборудование системы посадки с контролем по обзорному радиолокатору.
- ОПРС — с использованием отдельной приводной радиостанции (ОПРС).
- VOR/DME — с использованием оборудования всенаправленных дальномерного и азимутального радиомаяков.
Значения посадочных метеоминимумов для неточной посадки указываются в аэронавигационных сборниках для каждого конкретного аэродрома и конкретного класса воздушного судна. Типичные значения находятся в пределах: видимость 1500—2000 м, высота нижней границы облаков 110—130 м (рис.1).
Рис.1 Схемы инструментального захода на посадку.
Cхема захода на посадку по приборам может иметь пять отдельных участков:
- прибытие с маршрута (Arrivalroute);
- уход на повторный заход (Missedapproach).
Участки захода на посадку начинаются и заканчиваются в пределах, установленных контрольными точками. Знание участков маршрута прибытия для захода на посадку предполагает знание пилотом критериев пролета препятствий, выдерживания ограничений по скорости, кренов и других параметров, которые свойственны каждому участку.
На многих схемах захода на посадку публикуется точка IAF с целью представления пилоту информации, что после пролета этой точки ВС находится вне пределов маршрутной структуры и начинается участок осуществления маневра для захода на посадку.

Рис.2 Этапы инструментального захода на посадку.
Участки схемы захода на посадку:
IAF (Initial Approach Fix) — фиксированная точка начального этапа захода на посадку
IF (Intermediate Fix) — фиксированная точка промежуточного этапа;
FAP (Final Approach Point) — точка конечного этапа захода на посадку;
FAF (Final Approach Fix) — фиксированная точка конечного этапа захода на посадку;
MAP (Missed Approach Point) — точка ухода на повторный заход.
Участок подхода (Arrival Route) - полет на последнем участке маршрута до контрольной точки начального участка захода на посадку (Initial Approach Fix - IAF). При необходимости публикуется на схемах STAR. На маршруте подхода применяются критерии безопасности пролета препятствий аналогичные критериям маршрутной структуры.
Начальный участок (Initial Approach Segment) - полет от точки IAF до контрольной точки промежуточного этапа захода на посадку (Intermediate Approach Fix - IF). Этот и последующие этапы должны иметь контрольные точки. При полете на начальном этапе ВС находится вне маршрутной структуры и осуществляет маневр для выхода на промежуточный участок
захода на посадку. Скорость и конфигурация ВС зависят от расстояния до аэродрома и потребного снижения. Зона начального этапа захода может иметь протяженность 15 - 30 морских миль (25 - 50 километров) и ширину не менее 10 морских миль (по 5 миль в каждую сторону от оси маршрута). Обеспечивается безопасная высота пролета над препятствиями 1000 футов (300 метров). Высота полета на начальном участке - не менее высоты входа в глиссаду или начальной высоты выполнения схемы захода на посадку.
В случае отсутствия подходящей точки начального или промежуточного этапа захода на посадку, применяется обратная схема захода, схема "Ипподром" и так далее.
Промежуточный участок (Intermediate Approach Segment) - полет от точки IF до контрольной точки конечного этапа захода на посадку (Final Approach Fix - FAF, USA или Final Approach Point - FAP, ICAO). На этом этапе производится корректировка конфигурации и скорости полета ВС для подготовки к конечному этапу захода на посадку. На схемах, где указана FAF (указывается знаком ´), промежуточный участок начинается с того момента, когда ВС находится на линии пути приближения стандартного разворота, обратного разворота на посадочный курс или на конечном участке приближения схемы "Ипподром". Там, где не указана точка FAF, линия пути приближения представляет собой конечный участок захода на посадку, а промежуточный этап отсутствует.
Точка IF и весь промежуточный участок должны лежать на линии посадочного курса. Если заход на посадку осуществляется по неточным системам, отклонение промежуточного этапа от линии посадочного курса должно быть £10°. Угол между начальным этапом и линией посадочного курса для точных систем должен быть £90°, для неточных систем - £120°.
Конфигурация и размеры зоны промежуточного этапа зависят от применяемых посадочных устройств и схемы захода на посадку, но ее протяженность не должна быть менее 8,5 морских миль. Безопасная высота пролета препятствий на этом участке составляет 500 футов (150 метров).
Конечный этап (Final Approach Segment) - полет от точки FAF до точки ухода на второй круг (Missed Approach Point - MAP). Этот этап делится на две стадии:
Дальняя прямая (Long Final) - участок полета до внешнего маркера.
Ближняя прямая (Short Final) - участок полета от внешнего маркера до точки MAP, после которой может быть выполнена посадка или начат уход на второй круг.
При выполнении точного захода на посадку точка FAF находится в точке входа в глиссаду, пролет которой производится, как правило, на относительных высотах от 1000 до 3000 футов или на расстоянии от 3 до 10 морских миль от порога ВПП.
При выполнении неточного захода точка FAF может располагаться над радионавигационным средством или может определяться по дальности от радионавигационного средства (обозначается знаком ´ на схемах профиля полета при заходе на посадку). В этом случае ВС пересекает FAF на указанной абсолютной (относительной) высоте или выше, а затем начинает снижение. На схемах в расчетных таблицах публикуется градиент снижения, а если есть информация о дальности полета, представляются данные о профиле снижения.
В некоторые схемы неточного захода на посадку может быть включена точка ступенчатого снижения. В этом случае указываются два значения ОСА/Н: большее значение, применяемое в основной схеме, и меньшее значение, применяемое только в тех случаях, если контрольная точка ступенчатого снижения точно определяется при заходе на посадку. Как правило, указывается только одна контрольная точка ступенчатого снижения, однако при полете по схеме с применением VOR/DME может быть установлено несколько контрольных точек по DME, каждая из которых связана с минимально допустимой абсолютной высотой пролета препятствий.
Если аэродром оборудован единственным навигационным средством, расположенным на нем или вблизи его, при отсутствии какого - либо другого удобно расположенного навигационного средства, для образования FAF может быть разработана схема, где имеющееся навигационное средство будет служить одновременно в качестве IAF и MAP.
На этих схемах будет указана минимальная / относительная высота для полета по обратной схеме или схеме типа "Ипподром" и OCA/H для конечного этапа захода на посадку. При отсутствии FAF снижение до MDA/H производится после выхода ВС на линию пути приближения конечного этапа захода на посадку.
Как правило, линия пути конечного этапа захода на посадку схем подобного типа не может быть сопряжена по прямой с осевой линией ВПП. Решение публиковать или нет ОСА/Н в числе ограничений захода на посадку с прямой зависит от величины углового расхождения между линией пути и осевой линией ВПП.
Зона конечного этапа захода на посадку по ILS значительно уже аналогичных зон при неточном заходе на посадку. Снижение по глиссаде ни в коем случае не начинается до тех пор, пока ВС не войдет в зону допусков осуществляющего наведение курсового маяка. При построении поверхностей предельных высот препятствий для ILS допускается, что экипаж ВС после установившегося полета по осевой линии, как правило, отклоняется от курса не более чем на половину шкалы нулевого индикатора. После этого ВС должно удерживаться на курсе и глиссаде, поскольку отклонение от курса более чем на половину сектора курса или отклонение от глиссады более чем на половину шкалы "лети выше" в сочетании с другими допусками для системы может привести ВС к границе или к нижнему пределу защищаемого воздушного пространства, где может не гарантироваться безопасность от столкновения с препятствиями.
В случаях, когда при заходе теряется наведение по глиссаде, заход на посадку становится неточным. В этом случае применяется значение ОСА/Н, публикуемое для ситуаций, когда глиссадный радиомаяк не работает.
Уход на второй круг (Missed Approach) - неудавшийся заход на посадку. Во время этапа ухода на второй круг при полете по схеме захода по приборам экипажу ВС необходимо изменить конфигурацию ВС, угловое пространственное положение и абсолютную высоту ВС.
В силу этого схема ухода на второй круг максимально упрощена и состоит из трех этапов: начальный, промежуточный и конечный.
Схема ухода на второй круг, предназначенная для предотвращения столкновения с препятствиями при выполнении маневра ухода на второй круг, предусматривается для каждой схемы захода на посадку по приборам. На схеме указываются точка, где начинается уход на второй круг, а также точка или абсолютная / относительная высота, где он заканчивается. Допускается, что уход на второй круг должен начинаться не ниже, чем DA/H в схемах точного захода на посадку, или при применении схем неточного захода - в указанной точке, которая расположена не ниже, чем MDA/H.
Точка начала ухода на второй круг (MAP) в схеме может обозначаться:
- точкой пересечения электронного луча глиссады ILS и применяемой DA/H;
- указанием расстояния от контрольной точки конечного этапа захода на посадку (FAF).
В том случае, если МАР определяется навигационным средством или контрольной точкой, как правило, также публикуется расстояние от FAF до МАР, которое может использоваться для определения времени полета до МАР. Во всех случаях, когда использовать определение по времени использовать нельзя, на схеме делается пометка "определение МАР по времени не разрешается".
Если до пролета МАР не был установлен необходимый визуальный контакт с ориентирами, схема предусматривает немедленное осуществление ухода на второй круг во избежание столкновения с препятствиями.
Для каждой схемы захода публикуется только одна схема ухода на второй круг и предполагается, что экипаж ВС будет выполнять полет по ней. В том случае, когда уход на второй круг начинается до достижения точки начала ухода на второй круг, предполагается, что экипаж обычно продолжает полет к точке начала ухода на второй круг, а затем будет следовать опубликованной схеме с целью предотвращения выхода за пределы защищаемого воздушного пространства. Допускается пролет над точкой ухода на второй круг (МАР) на большей абсолютной / относительной высоте, чем это предусмотрено схемой.
Обычно схемы ухода основываются на номинальном градиенте набора высоты при уходе на второй круг, равном 2,5%. При разработке схем может использоваться градиент 2%, если могут быть обеспечены необходимые наблюдения и меры предосторожности. С одобрения соответствующего полномочного органа могут использоваться градиенты, составляющие 3, 4 и 5% для тех ВС, чьи характеристики скороподъемности имеют при этом соответствующие эксплуатационные преимущества. Если используется градиент, отличный от 2,5%, это будет указываться на карте захода на посадку по приборам. В дополнение с ОСА/Н для конкретного применяемого градиента будет также указываться ОСА/Н для номинального градиента.
Начальный этап ухода на второй круг начинается в точке МАР и заканчивается в точке, где устанавливается режим набора высоты. Маневрирование на этом этапе требует от экипажа повышенного внимания, особенно при переходе к набору высоты и изменении конфигурации ВС. Поэтому при выполнении этих маневров, как правило, невозможно полностью использовать оборудование наведения, в следствие чего на этом этапе не предусматривается выполнение маневров.
На промежуточном этапе продолжается набор высоты, как правило, при полете по прямой. Он продолжается до первой точки, в которой достигается и может выдерживаться высота пролета над препятствиями в 50 метров (164 фута). Линия пути этого этапа может быть изменена максимум на 15° относительно линии пути начального этапа ухода на второй круг. Предполагается, что на этом этапе экипаж начинает корректировать полет по линии пути.
Конечный этап начинается в точке, где впервые достигается и может выдерживаться высота пролета над препятствиями в 50 метров (164 фута) и продолжается до точки, в которой начинается новый заход на посадку, полет в зоне ожидания или возобновляется полет по маршруту. На этом этапе может предписываться выполнение разворотов.
Ширина зоны ухода на второй круг при наличии радиолокационного контроля может быть расширена по 10° в обе стороны от оси ВПП. Безопасная высота пролета над препятствиями в зоне ухода устанавливается в 30 метров (100 футов).
Посадка с круга.
(заход на посадку по большому и малому прямоугольному маршруту).
Заход на посадку по малому прямоугольному маршруту применяется, когда в районе аэродрома посадки нет других воздушных судов, препятствующих подходу к аэродрому на снижении, или когда невозможен заход на посадку с прямой.
Для захода на посадку по малому прямоугольному маршруту ВС подводится к аэродрому с посадочным курсом или близким к нему. После выхода на ДПРМ (БПРМ) на исходной высоте начала маневра для захода на посадку выполняется разворот на 180° со снижением и ВС выводится на курс, обратный посадочному. В процессе разворота при достижении высоты полета по кругу скорость полета уменьшается. На траверзе ДПРМ выпускаются шасси, и полет продолжается к точке третьего разворота в течение времени, установленного согласно данной схеме. По истечении времени или при МПР = МПР3 выполняется третий разворот с креном 15°. После третьего разворота ВС следует под прямым углом к предпосадочной прямой. При МПР = МПР4 выполняется четвертый разворот на посадочный курс с креном 15°. После входа в глиссаду снижение выполняется аналогично снижению при заходе на посадку с прямой.
В ряде случаев для захода на посадку по малому прямоугольному маршруту ВС выводится на ДПРМ на установленной высоте полета по кругу. Так как далее ВС должен следовать по прямоугольному маршруту,то после выхода на ДПРМ необходимо: выполнить первый разворот с креном 15°; после окончания первого разворота пройти в направлении, перпендикулярном направлению посадки, в течение расчетного времени t2; выполнить второй разворот на курс, обратный посадочному; далее завершить полет по прямоугольному маршруту, как указано выше. В тех случаях, когда ВС выводится на аэродром с курсом, отличающимся от посадочного более чем на 45°, выполняется дополнительный маневр для вписывания в схему малого прямоугольного маршрута. Порядок выполнения дополнительного маневра указывается на схемах.
Заход на посадку по большому прямоугольному маршруту применяется, когда выход к аэродрому ограничен высотой подхода по условиям рельефа, интенсивностью воздушного движения и метеоусловиями. Основой для построения этой схемы захода на посадку служит малый прямоугольный маршрут.
Началом маневра является ДПРМ, выход на который производится в нижнем воздушном пространстве на эшелонах, расположенных выше исходной высоты для малого прямоугольного маршрута. После выхода на ДПРМ ВС с посадочным курсом переводится в режим снижения с вертикальной скоростьюи скоростью по прибору, согласно РЛЭПолет от ДПРМ продолжается в течение установленного времени до высоты начала разворота на 180°. По истечении указанного в схеме времени выполняется разворот на 180° с сохранением прежней скорости по прибору и вертикальной скорости снижения.
После разворота на курс, обратный посадочному, продолжается снижение с сохранением прежнего режима до высоты полета по кругу. По достижении этой высоты снижение прекращается и ВС переводится в режим горизонтального полета с погашением скорости по прибору.От траверза ДПРМ заход выполняется аналогично заходу на посадку по малому прямоугольному маршруту.

Опора деревянной одностоечной и способы укрепление угловых опор: Опоры ВЛ - конструкции, предназначенные для поддерживания проводов на необходимой высоте над землей, водой.
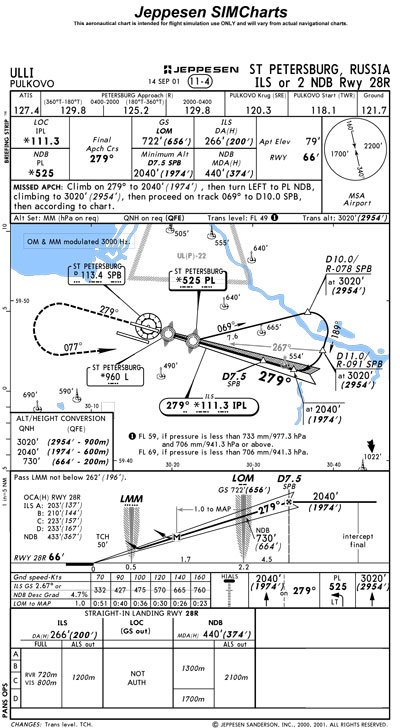
Возьмем для примера родное Пулково. Подход на 28 правую полосу.
Содержание
Заголовок карты:

1. Код аэропорта по ICAO. Его название.
2. Дата последней редакции.
3. Индекс листа внутри пакета карт, относящихся к данному аэропорту.
4. Город и страна аэропорта.
5. Процедура для которой предназначена данная карта. Номер полосы.
Связь (частоты):

1. Частота ATIS (Automatic Terminal Information Service) - железная баба, голос записанный на пленку и по кругу гоняющий в эфир такую информацию об аэропорте как: погода, рабочие полосы и прочую полезную инфу. 127.4 Мгц в данном случае. В России еще называется службой "Метео".
2 - 4. Частоты диспетчерского пункта подхода. С "Подходом" работаем при подлете к зоне аэродрома, при пересечении высоты перехода (transition altitude). Они сообщают условия входа в зону, условия выполнения подхода (STAR). При вылете координируют точку выхода из зоны аэродрома.
2. Частота, используемая в период времени с 4 утра до 8 вечера для ВС с истинным курсом сектора от 360 до 180 градусов (восточное направление).
3. Частота, используемая в период времени с 4 утра до 8 вечера для ВС с истинным курсом сектора от 180 до 360 градусов (западное направление).
4. Частота, используемая в период времени с 8 вечера до 4 утра (время по Гринвичу, оно же GMT, оно же Zulu Time).
5. Частота для связи с диспетчером ближней зоны. В западной системе радиообмена зоны "Круг" нет. Служба "Круг" бережет нас на высоте от 200 метров (ниже работает служба "Старт"), назначает безопасную высоту (как правило 1800 метров) и дает указания по выходу из района аэродрома. Это при взлете. При посадке, "Круг" разрешает заход и корректирует его схему.
6. Частота для связи со службой "Старт". При взлете у нее запрашивается разрешение занять исполнительный и на взлет, и она передает нам условия выхода из зоны аэропорта. При посадке - мы должны заявить о готовности к ней или об уходе на второй круг. Зона ответственности до высоты 200 метров. Выше - зона ответственности службы "Круг". После посадки и освобождения полосы мы связываемся с этой службой, благодарим и прощаемся, переключаясь на службу "Руление".
7. Частота для связи с диспетчером "Руление" (Ground). На этой частоте просят разрешение на запуск двигателей и на руление. В данной ситуации (посадке) нам должны сообщить маршрут руления и место стоянки.
Буквы и цифры навигацкие:
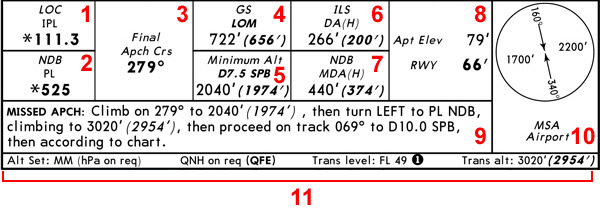
1. Частота локалайзера. IPL - идентификатор - эти три буквы азбукой Морзе постоянно передается на данной частоте.
2. Частота NDB. Звездочка (*) означает, что этот маяк работает с перерывами. В Пулково дважды в сутки изменяют направление взлета-посадки - я наблюдаю это почти каждый день из окна своей кухни.
3. Посадочный курс.
4. Следует читать так: При движении по глиссаде с использованием ILS, в точке прохождения дальнего приводного маркера высота должна быть 722 фута (над уровнем моря) или 656 футов (над аэродромом).
5. Следует читать так: На удалении 7.5 миль от VOR "SPB" минимальная высота 2040 футов над уровнем моря.
6. При ILS посадке высота принятия решения - 266 футов. "Н" в скобках - height - высота над аэродромом.
7. 440 футов - MDA (Minimum Descent Altitude) - минимальная высота, до которой разрешается снижение во время захода по неточным системам, при отсутствии визуального контакта с ориентирами.
8. Apt Elev - превышение аэродрома, др. словами: самая высокая точка ВПП. RWY - высота ВПП в точке касания в футах над уровнем моря.
9. Инструкция по уходу на второй круг.
10. MSA - минимальная безопасная высота в указанных секторах. "Aiport" - указание на то, что в центре круга именно аэропорт. Радиус круга - 25 миль по умолчанию.
11. Здесь пишется дополнительная информация касающаяся процедуры.
Alt set - установка альтиметра. Здесь по умолчанию применяются миллиметры (ММ), а Гектопаскали - по требованию.
QNH on req (QFE) - барометрическое давление на уровне моря ATC дает по требованию.
Transition altitude - высота перехода. Ниже этой высоты альтиметр устананавливается по давлению над уровнем моря. Выше - 29.92 дюймов ртутного столба или 1013.25 Гектопаскалей (миллибар) или 760 мм ртутного столба.
Transition level - эшелон перехода, где переустанавливают альтиметр с 760 мм на реальное давление на уровне моря. FL 49 - 4900 футов. Единица в черном кружке примечание, о котором мы вспомним чуть позже.
Векторение – обеспечение навигационного наведения ВС в форме определенных курсов полета, основанных на использовании систем наблюдения.
Векторение обеспечивается посредством указания экипажу воздушного судна конкретных курсов, которые позволят воздушному судну выдерживать необходимую линию пути. Необходимость векторения определяется органом ОВД из анализа воздушной обстановки.
Векторение применяется для:
- обеспечения установленных интервалов эшелонирования;
- упорядочения потока воздушных судов;
- регулирования очередности захода на посадку;
- оказания навигационной̆ помощи экипажу воздушного судна.
Основные принципы векторения:
- когда воздушное судно начинает наводиться с отклонением от ранее заданного маршрута, пилоту сообщается о целях такого наведения (например, для создания интервала, для захода на посадку);
- векторение производится в основном в контролируемом ВП, то есть в ВП категории A и C. В неконтролируемом только в случаях аварийной ситуации или для обхода района с неблагоприятными метеорологическими условиями.
- производится по запросу пилота.
При векторении воздушного судна диспетчер придерживается следующего порядка:
а) во всех случаях, когда это представляется возможным, векторение воздушного судна осуществляется по линиям пути, на которых пилот может следить за местоположением воздушного судна, используя для данной цели показания навигационных средств, интерпретируемые пилотом;
б) когда воздушное судно начинает наводиться с отклонением от ранее заданного маршрута, пилоту сообщается о целях такого наведения;
в) за исключением случаев передачи ОВД, векторение не выполняется на удалении менее половины установленного интервала эшелонирования от границы зоны ответственности, если в местных технологиях работы не определены правила обеспечения эшелонирования между воздушными судами, выполняющими полеты в смежных районах;
г) воздушные суда, выполняющие контролируемые полеты, не наводятся в неконтролируемое воздушное пространство, за исключением случаев, когда возникает аварийная обстановка или необходимо обойти район с неблагоприятными метеорологическими условиями, или имеется специальный запрос экипажа воздушного судна.
Так как векторение возможно производить только после опознавания ВС, необходимо комплексно использовать следующие методы:
- пеленгацию – сравнение значений пеленга ВС на индикаторе автоматического радиопеленгатора (АРП) и азимута отметки на ИВО;
- привязку – сопоставление координат известной точки (в момент доклада экипажа ВС о ее пролете) с координатами опознаваемой отметки местоположения ВС на ИВО;
- маневр – сопоставление направления перемещения отметки от ВС на ИВО с направлением заданным диспетчером;
- сравнение – сопоставление информации, передаваемой экипажем ВС и отображаемой на ИВО в формуляре сопровождения ВС.
Необходимо чётко представлять распределение ответственности между экипажем и диспетчером (табл.13).
Табл. 13 Распределение ответственности между экипажем и диспетчером при векторении.
Восприятие векторения невозможно без упоминания другого навигационного понятия, применяемого в международной авиационной практике – применение экипажем средств навигации ВС, или по-другому, собственной навигации, применяемой на большей части полёта. Собственная навигация означает, что экипаж осуществляет самолетовождение, используя бортовое оборудование воздушного судна. В этом случае экипаж, ответственен за местоположение ВС и за соблюдение безопасных высот. Диспетчер, осуществляющий диспетчерское обслуживание, отвечает за эшелонирование. Это не означает, что диспетчер не сообщит экипажу об отклонении ВС от заданного маршрута в случае, если такое отклонение произойдет. Однако юридическая ответственность за навигацию и обязанность взять поправку в курс и вернуться на трассу остаются за экипажем.
Начало векторения.
- Информирование экипажа ВС о цели векторения.
- Выдача курса следования.
Окончание векторения.
- Информирование экипажа ВС о местоположении.
- Выдача команды на следование с курсом на точку для возврата на линию пути.
Векторение в верхнем воздушном пространстве РФ существенно ограничено запретом на отклонение ВС от воздушной трассы (ВТ). Основные три случая, при которых разрешается отклонение ВС от ВТ: вынужденная посадка вне аэродрома, следование на запасный аэродром, обход опасных метеоявлений. В основном не принято отклонять ВС от маршрута полета для обеспечения интервалов эшелонирования. Более того, в отношении иностранных ВС действуют еще более строгие ограничения. Использование воздушного пространства иностранными ВС за пределами международных ВТ запрещено ФП ИВП.
Векторение для захода на посадку.
При векторении для захода на посадку по приборам диспетчер задает воздушному судну курс или серию курсов для вывода воздушного судна на линию пути конечного этапа захода на посадку. При выполнении захода на посадку по ИЛС и/или МЛС или радиолокатору последний заданный курс обеспечивает выход воздушного судна на линию пути конечного этапа захода на посадку под углом не более 45 градусов в режиме горизонтального полета как минимум за 2 км (как правило, за 3 — 5 км) до входа в глиссаду (рис.72).

Рис. 72. Общий план векторения для захода на посадку
При векторении воздушного судна на радиотехническое средство обеспечения конечного этапа захода на посадку диспетчер дает экипажу указание доложить о выходе на линию пути конечного участка захода на посадку. Разрешение на заход выдается одновременно с последним заданным курсом. Векторение прекращается в тот момент, когда воздушное судно отклоняется от последнего заданного курса с тем, чтобы выйти на линию пути конечного этапа захода на посадку (рис.73).

Рис. 73 Пример векторения ВС при заходе на посадку по системе ILS
Интервалы эшелонирования между воздушными судами на конечном этапе захода на посадку обеспечивает орган диспетчерского обслуживания подхода, за исключением случаев, когда эти функции возложены на орган аэродромного диспетчерского обслуживания при условии, что орган аэродромного диспетчерского обслуживания использует систему наблюдения ОВД.
При прекращении векторения воздушного судна орган ОВД дает указание его экипажу возобновить самостоятельное самолетовождение, сообщая ему местоположение воздушного судна и при необходимости курс следования для выхода воздушного судна на установленный маршрут, если в результате векторения воздушное судно отклонилось от ранее назначенного маршрута
Курсы должны задаваться трехзначными числами. В примерах фразеологии, предлагаемых Doc 4444 и российскими Правилами и фразеологией радиообмена на английском языке, значения курсов состоят из трех цифр.
CONTINUE HEADING (three digits);
FLY HEADING/ HEADING (three digits);
TURN LEFT (or RIGHT) (number) DEGREES (or HEADING (three digits)) [reason].
Что касается информации о длине задаваемой траектории, то она не содержится в документах ICAO, однако, в зарубежной практике ОВД такая информация очень часто передаётся.
Информация о расстоянии, которое ВС предстоит пройти в процессе векторения, нужна экипажу для расчета профиля снижения. Если при полете по STAR и схеме захода это расстояние всегда известно, то при векторении только диспетчер может определить длину траектории, по которой он намеревается завести ВС на посадку. Конечно, не всегда диспетчер может точно рассчитать эту величину. Обычно это делается приблизительно, с округлением (например, кратно 5 км). Однако даже в таком виде эта информация представляет для экипажа значительную ценность. Передается она, как правило, в ВС остается пролететь 40-80 км.
Первоначальный выход на VOR (NDB) осуществляется в соответствии с правилами полета по маршруту. Минимальные безопасные высоты при заходе на посадку по VOR (NDB) приведены в таблице:
Удаление VOR (NDB)
Минимальные безопасные высоты
VOR (NDB), используемый для захода на посадку (см. рисунок), может находиться не на продолжении осевой линии ВПП. Угол между линией конечного этапа захода на посадку и продолжением осевой линии ВПП не должен превышать 30, а расстояние между торцом ВПП и точкой, в которой линия пути конечного этапа захода на посадку пересекает продолжение осевой линии ВПП, должно быть не менее 900 метров (3000 футов).
В этих случаях при заходе на посадку требуется доворот в створ ВПП. Минимальные расстояния до торца ВПП, на которых должен быть осуществлен выход в створ ВПП, приведены в таблице:
В случае, когда основное посадочное средство аэродрома расположено не на линии посадочного курса, в заголовке схемы захода на посадку рядом с указанием процедуры захода на посадку может быть указан суфикс, еапример A, B, C… (например: VOR-B, LOC (BACK CRS)-A и так далее). Данный суфикс указывает на то, что для данного средства захода на посадку взлетный и посадочный минимумы не установлены.
Заход на посадку по двум ndb
Такая процедура выполняется при наличии на борту ВС двух АРК, если NDB расположены на расстоянии не более 10 морских миль друг от друга.
Выполнение захода на посадку не отличается от выполнения захода на посадку по ОСП в России.
Профиль снижения представляет собой ломаную глиссаду снижения по принципу:
От последнего разворота до ДРМ - не ниже установленной высоты пролета ДРМ.
От ДРМ до СРМ - не ниже установленной высоты пролета СРМ.
От СРМ до БРМ - не ниже установленной высоты пролета БРМ или не ниже высоты принятия решения.
Минимальные безопасные высоты при заходе на посадку по двум NDB устанавливаются:
При выполнении схемы захода - 300 метров (1000 футов).
От ТВГ до ДПРМ - 150 метров (500 футов).
От ДПРМ до БПРМ - 60 метров (200 футов).
От БПРМ до МАР - 30 метров (100 футов).
1. Воздушная навигация и аэронавигационное обеспечение полётов: [учеб. для высш. лётных учеб. завед. ГА / А. М. Аникин, А. М. Белкин, Н. Ф. Миронов и др.] Под ред. Н. Ф. Миронова. – М.: Транспорт, 1992. – 294 с.
2. Кузьмин, Н. А. Воздушная навигация и аэронавигационное обеспечение полётов: курс лекций. Учеб. пособие: в 2-х частях. Ч.1 / Н. А. Кузьмин. – Ульяновск: УВАУ ГА, 2004. – 111 с.
3. Кузьмин, Н. А. Воздушная навигация и аэронавигационное обеспечение полётов: курс лекций. Учеб. пособие: в 2-х частях. Ч.2 / Н. А. Кузьмин. – Ульяновск: УВАУ ГА, 2006. – 199 с.
Чёрный, М. А. Воздушная навигация: [учебник для сред. спец. учеб. зав. ГА] / М. А. Чёрный, В. И. Кораблин. – 4-е изд., перераб. и доп. – М.: Транспорт, 1991. -432 с.
Тут вы можете оставить комментарий к выбранному абзацу или сообщить об ошибке.
Читайте также: