
Заход на посадку отворотом на расчетный угол
Добавил пользователь Евгений Кузнецов Обновлено: 19.09.2024
На вертолете МИ-8 заход на посадку по приборам в облаках и в закрытой кабине производится по ближней приводной радиостанции посадочной системы аэродрома или по отдельной приводной радиостанции, установленной на удалении 1300 м от места приземления, одним из следующих способов: с прямой отворотом на расчетный угол, по коробочке и по малой коробочке.
Заход на посадку с прямой рекомендуется выполнять в тех случаях, когда выход с маршрута или из зоны на приводную радиостанцию аэродрома производится с магнитным курсом, обратным посадочному или отличающимся от него не более чем на 60°.
При выходе на ПРС с магнитным курсом равным посадочному или отличающемуся от него не более чем на 60°, рекомендуется выполнять заход по коробочке. Когда выход на ПРС производится с магнитным курсом, отличающимся от посадочного более чем на 60°, но не более чем на 120°, заход на посадку следует выполнять по малой коробочке.
Способ захода на посадку определяется командиром, организующим полеты, в зависимости от установленной для аэродрома схемы снижения и захода на посадку, характера выполняемых полетов и воздушной обстановки. Для предотвращений возможного сближения вертолетов расчетные данные при заходе на посадку должны быть едиными для всех экипажей.
При выполнении полетов с заходом на посадку с применением посадочных систем набор высоты рекомендуется производить на скорости 150 км/ч с вертикальной скоростью 3— 4 м/с, горизонтальный полет выполнять на скорости 160 км/ч, снижаться на скорости 150 км/ч с вертикальной скоростью 2—3 м/с, развороты выполнять с креном 10°. В целях выхода в створ ВПП при выполнении разворота на посадочный курс крен разрешается увеличивать, но не более чем до 15°.
Заход на посадку с прямой
Полеты для отработки захода на посадку с прямой в облаках или в закрытой кабине рекомендуется выполнять на высоте не ниже 500 м по схеме, приведенной на рис. 29. Заход на посадку может выполняться как с левым, так и с правым разворотом,
При подготовке к полету необходимо по известному ветру рассчитать магнитные курсы (МК) и путевое время для каждого участка маневра, а

Рис. 29. Схема выполнения учебных полетов для отработки заходов на посадку с прямой
также величину расчетного угла (РУ). Расчетный угол определяется по формуле

где R— радиус разворота на посадочный курс, м;
Wгп — путевая скорость горизонтального полета, м/с;
tгп - время горизонтального полета, с.
При постоянных значениях скорости горизонтального полета и крена на развороте РУ будет зависеть только от времени горизонтального полета.
Время горизонтального полета tгп, с) рассчитывается по формуле


где Н—высота вывода вертолета на посадочный курс с учетом потери высоты (200 м) за время разворота, м;
Wсн.ср — путевая скорость полета при снижении на посадочном курсе,км/ч;
Wгп — путевая скорость горизонтального полета, км/ч;
Vв —вертикальная скорость снижения, м/с.
При постоянных значениях скорости горизонтального полета, а также поступательной и вертикальной скорости снижения время будет зависеть только от высоты, на которой вертолет выводится из разворота на посадочный курс.
Величину РУ можно определить на навигационной линейке НЛ-10, пользуясь ключами, приведенными на рис. 30.
Значения РУ и tгп для различных высот рекомендуется свести в таблицу, которая должна находиться на борту вертолета. В табл. 6 приведены данные для горизонтального полета на скорости 160 км/ч, снижения на скорости 150 км/ч с вертикальной скоростью 2—3 м/с при развороте на посадочный курс с креном 10° для штилевых условий.
При выполнении полетов для отработки заходов на посадку с прямой в облаках или в закрытой кабине для обеспечения безопасности должны быть соблюдены следующие требования.
Время полета от взлета до начала разворота на приводную радиостанцию и время горизонтального полета от приводной радиостанции до начала расчетного разворота должны быть едиными для всех летающих экипажей. Кроме того, после взлета и до начала разворота на ПРС экипажу набирать высоту на 200 м меньше высоты горизонтального полета. Это требование следует соблюдать и в тех случаях, когда повторные заходы выполняются без посадки, а также при уходе на второй круг. Разворот на ПРС выполнять в режиме набора высоты с таким расчетом, чтобы к моменту вывода из разворота (КУР=0±УС) была набрана установленная высота горизонтального полета. Разворот на посадочный курс выполнять со снижением с таким расчетом, чтобы за время разворота высота полета уменьшилась на 200 м.
При подготовке к полету время от взлета до разворота на ПРС, а также время tгп рассчитывается по известному ветру и на предполетной подготовке сообщается всем летающим экипажам.
После взлета набор высоты производить на скорости 150 км/ч с вертикальной скоростью 3—4 м/с. По достижении высоты па 200 м меньше той, на которой после разворота на ПРС будет выполняться горизонтальный полет, перевести вертолет в режим горизонтального полета на скорости 150 км/ч. По истечении расчетного времени с разрешения руководителя полетов выполнить разворот на приводную радиостанцию (КУР=0±УС) с набором высоты на скорости 150 км/ч и с вертикальной скоростью 3—4 м/с. По достижении заданной высоты вертолет перевести в режим горизонтального полета, установить скорость 160 км/ч и выполнить полет на ПРС.
По мере приближения к ПРС показания радиокомпаса будут все более неустойчивыми. При пролете зоны неустойчивых показаний радиокомпаса рекомендуется выдерживать магнитный курс по указателю курсовой системы.
В момент прохода ПРС включить секундомер, выполнить отворот вправо или влево на расчетный угол с учетом угла сноса и доложить об этом руководителю полетов.
По истечении расчетного времени tгп доложить руководителю полетов, перевести вертолет на снижение со скоростью 150 км/ч и вертикальной скоростью 2—3 м/с и выполнить разворот на посадочный курс с креном 10° и потерей, высоты за время разворота 200 м.
В момент ввода в разворот и в первой его половине стрелка радиокомпаса, двигаясь к отсчетному индексу, находится впереди курсозадатчика. Между стрелками имеется угол, приблизительно соответствующий значению РУ. При правильном выполнении разворота, когда до выхода на посадочный курс останется 90°, угол между курсозадатчиком и стрелкой радиокомпаса на УГР-4УК должен быть примерно 15°, как показано на рис. 31. При дальнейшем развороте угол между курсозадатчиком и стрелкой радиокомпаса будет уменьшаться и примерно за 30° до выхода на посадочный курс курсозадатчик и стрелка радиокомпаса должны совместиться и оставаться совмещенными. На рис. 32 приведены показания УГР-4УК за 30° до выхода на посадочный курс при правильном выполнении разворота.
Если во второй половине разворота угол между стрелкой радиокомпаса и курсозадатчиком будет оставаться неизменным или даже начнет увеличиваться (летчик спешит), крен необходимо уменьшить. Если же после совмещения стрелка радиокомпаса начнет отставать от курсозадатчика (летчик медлит), крен необходимо увеличить, но не более чем до 15°.
Вывод из разворота при отсутствии сноса на посадочном курсе производить с таким расчетом, чтобы стрелка радиокомпаса, совмещенная с курсозадатчиком (посадочным курсом), установилась под отсчетным индексом.

Рис31 Показания УГР-4УК за 90° до выхода на посадочный курс при правильном выполнении разворота
При боковом ветре стрелка радиокомпаса, совмещенная с курсозадатчиком, должна находиться в стороне от отсчетного индекса на величину угла сноса (справа—при правом и слева—при левом сносе). После выхода на посадочный курс командир экипажа с разрешения руководителя полетов производит снижение, сохраняя скорость 150 км/ч и вертикальную скорость 2—3 м/с.

Рис.32. Показания УГР-4УК за 30° до выхода на посадочный курс при правильном выполнении разворота

Рис. 33. Показания УГР-4УК при исправлении ошибки выхода на посадочный курс
Вертолет развернуть на стрелку радиокомпаса (от курсозадатчика) так, чтобы она установилась посредине между отсчетным индексом и курсозадатчиком (посадочным курсом). Магнитный курс, установившийся при этом под отсчетным индексом, следует выдерживать до совмещения стрелки радиокомпаса с курсозадатчиком (посадочным курсом). После этого развернуть вертолет на совмещенные стрелки радиокомпаса и курсозадатчика до установления их под отсчетным индексом (при отсутствии сноса на посадочном курсе) или в стороне от него на величину угла сноса.
Также следует поступать и в том случае, если вывод из разворота в направлении на приводную радиостанцию и относительно оси ВПП выполнен точно (при стрелке АРК, совмещенной с курсозадатчиком), но в процессе снижения из-за ошибки или сноса на посадочном курсе стрелка радиокомпаса отклонится от курсозадатчика (посадочного курса). Показания УГР-4УК при исправлении ошибки выхода на посадочный курс показаны на рис. 33.
При снижении на посадочном курсе необходимо выдерживать заданный режим, не допуская полета со скольжением. Ближнюю приводную радиостанцию проходить на высоте 100 м и на скорости 140 км/ч.

Рис. 34. Схема захода на посадку с прямой отворотом на расчетный угол с высоты 500 м
Летчик-штурман должен немедленно доложить командиру, если на высоте установленного для экипажа минимума погоды он не увидит землю (вертолет не вышел из облаков). В этом случае командир экипажа обязан прекратить дальнейшее снижение, доложить руководителю полетов и действовать по его указанию.
При возвращении на аэродром из зоны или с маршрута заход на посадку с прямой отворотом на расчетный угол (рис. 34) выполняется в том случае, если магнитный курс выхода на ПРС совпадает с курсом, обратным посадочному, или отличается от него не более чем на 60°.
По окончании выполнения задания в зоне или за 4—5 мин до расчетного времени прибытия на конечный пункт маршрута летчик, запрашивает у руководителя полетов условия выхода на ПРС. Руководитель полетов сообщает экипажу эшелон выхода на ПРС и способ захода на посадку, а при необходимости— и расчетные данные по выполнению маневра.
За 2—3 мин до выхода на ПРС установить скорость горизонтального полета 160 км/ч. После прохода ПРС развернуть вертолет на курс, отличающийся от обратного посадочному на расчетный угол, и доложить об этом руководителю полетов. В дальнейшем действовать так же, как и при выполнении учебных полетов для отработки заходов на посадку с прямой.
Заход на посадку одиночных вертолетов по приборам выполняется по ближней приводной радиостанции (БПРС) посадочной системы аэродрома или по отдельной приводной радиостанции (ОПРС), установленной в створе посадочной полосы на удалении 1300 м от места приземления.
Маневр захода на посадку при выходе вертолета на аэродром с маршрута или из зоны начинается с вывода вертолета на ОПРС. Перед выходом на ОПРС необходимо установить курсозадатчик
на посадочный магнитный путевой угол (ПМПУ). В зависимости от курса выхода вертолета на ПРС применяются следующие способы захода на посадку по приборам:
— отворотом на расчетный угол;
— по малой коробочке.
Заход на посадку отворотом на расчетный угол применяется при выходе вертолета на ОПРС с курсом, обратным посадочному или отличающимся от него не более 60°. Маневр захода на посадку выполняется следующим образом (рис. 14.1). В момент про-
хода ОПРС включается секундомер и вертолет разворачивается на магнитный курс следования в точку начала разворота (ТНР):
МК = ПМПУ ± 180° ± РУ — УС, (14.1)
где РУ — расчетный угол, знак плюс берется при отвороте вправо, минус при отвороте влево.
Величина расчетного угла определяется по формуле
2 R
где R —радиус разворота вертолета;
Sen — расстояние, проходимое вертолетом при снижении от ТНС до ОПРС;
Ц7СН — средняя путевая скорость при снижении на посадочном курсе;
ten — время снижения вертолета на посадочном курсе с высоты выхода в ТНС до высоты прохода ОПРС. Горизонтальный полет с расчетным курсом выполняется в течение времени,/г. п, которое определяется по формуле
где Н — высота полета вертолета в точке начала снижения (ТНС);
100 — высота прохода ОПРС, м;
WT. n — путевая скорость в горизонтальном полете от ОПРС до ТНР;
VB—вертикальная скорость снижения на посадочном курсе;
30 — время горизонтального полета перед ОПРС, с.
По истечении расчетного времени выполняется разворот вертолета на посадочный курс с заданным креном. В процессе разворота производится снижение не менее чем на 200 м.
Правильность выполнения разворота на посадочный курс контролируется по стрелкам радиокомпаса и курсозадатчика. В первой половине разворота стрелка радиокомпаса, двигаясь к отсчет — ному индексу курса, находится впереди курсозадатчика, и между ними имеется угол, примерно равный величине РУ. Во второй половине разворота угол между стрелками радиокомпаса и курсозадатчика будет уменьшаться и примерно за 30° до выхода на посадочный курс стрелки должны совместиться и оставаться совмещенными до выхода на посадочный курс. Если во второй половине разворота стрелка радиокомпаса начнет опережать кур- созадатчик, необходимо уменьшить крен, а при отставании стрелки радиокомпаса от курсозадатчика крен увеличить, но не более чем до 15°.
Вывод вертолета из разворота при отсутствии сноса на посадочном курсе производить с таким расчетом, чтобы совмещенные стрелки радиокомпаса и курсозадатчика установились под отсчет — ным индексом, а курс вертолета был равен посадочному путевому углу. При боковом ветре совмещенные стрелки радиокомпаса и курсозадатчика должны находиться в стороне от отсчетного индекса курса на величину угла сноса (справа — при положительном угле сноса, слева — при отрицательном угле сноса). После выхода на посадочный курс вертолет переводится на снижение с таким расчетом, чтобы высота прохода ОПРС была 100 м. При достижении этой высоты до прохода ОПРС вертолет переводится в горизонтальный полет. После прохода ОПРС продолжается дальнейшее планирование вертолета, а посадка выполняется визуально.
ким образом, чтобы под отсчетным индексом установился курс посадки с учетом угла сноса. Так же следует поступать, если в процессе снижения стрелки радиокомпаса и курсозадатчика разошлись из-за ошибок выдерживания или неучета УС. Исправление ошибок на посадочном курсе необходимо закончить до прохода ОПРС.
Заход на посадку по коробочке применяется при выходе вертолета на ОПРС с посадочным курсом или отличающимся от него не более 60°. Маневр захода на посадку выполняется следующим образом (рис. 14.2). В момент прохода ОПРС включается секундомер и вертолет разворачивается на посадочный курс с учетом угла сноса.

По истечении расчетного времени до первого разворота выполняется разворот на 90° влево (левая коробочка) или вправо (правая коробочка). Магнитные курсы и время полета на участках захода на посадку рассчитываются заранее по известному ветру. Начало второго, третьего и четвертого разворотов, а также пролет траверза ОПРС определяется по МПР, указанным на схеме, а контролируется по времени. После третьего разворота производится снижение. При достижении высоты 200 м вертолет переводится в горизонтальный полет. Четвертый разворот выполняется в режиме горизонтального полета,— а в процессе его выполнения необходимо добиться, чтобы при выходе на посадочный курс, при отсутствии сноса совмещенные стрелки радиокомпаса и курсозадатчика установились под отсчетным индексом курса. При правильном выполнении четвертого разворота стрелка радиокомпаса плавно подходит к курсозадатчику и примерно за 30° до выхода на посадочный курс обе стрелки должны совместиться.
Исправление ошибок на посадочном курсе, снижение, проход ОПРС и посадка выполняются, как при заходе на посадку отворотом на расчетный угол.
Заход на посадку по малой коробочке применяется при выходе вертолета на ОПРС с курсом, отличающимся от посадочного на 60—120° (рис. 14.3). В момент прохода ОПРС включается се
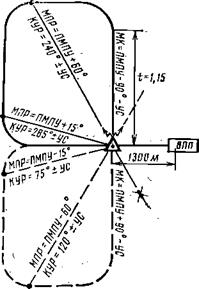
Рис. 14.3. Схема захода на посадку
по малой коробочке
кундомер и устанавливается курс, отличающийся от ПМПУ на 90° с учетом угла сноса. Магнитные курсы и время полета по участкам малой коробочки рассчитываются заранее по известному ветру. По истечении расчетного времени выполняется разворот на курс, обратный посадочному. В этот момент вертолет находится на траверзе ОПРС. В дальнейшем порядок выполнения маневра такой же, как и при заходе на посадку по коробочке.
При отказе курсовой системы в процессе захода на посадку по коробочке начало разворотов вертолета и пролет траверза можно определить по КУР, указанным на схеме с учетом угла сноса.
При отказе радиокомпаса (ОПРС) заход на посадку выполняется по радиопеленгатору, установленному, как и ОПРС, в створе посадочной полосы на удалении 1300 м от точки приземления. Способы захода на посадку остаются теми же, что и при заходе на посадку по ОПРС.
Главной особенностью захода по системе ОСП является отсутствие информации о действительном положении самолета относительно позиционной линии. Весь заход до ВПР выполняется по расчету экипажа методом подбора курса и вертикальной скорости. Это требует строгого распределения обязанностей между членами экипажа и четкого взаимодействия на заходе.
Штурман решает задачу подбора курса следующим образом. Четвертый разворот надо выполнить по возможности подальше, с учетом времени от выхода из разворота до ТВГ. В процессе разворота необходимо производить контроль в двух точках: первые 30 градусов МПР будет изменяться значительно и будет уменьшаться большая разница между МПР и МКп; к последней трети разворота стрелка АРК будет сближаться с задатчиком посадочного курса медленнее, а в конце разворота должна совпасть с ним.
Заход по курсо-глиссадной системе выгодно отличается от захода по приводам тем, что пилот имеет возможность наблюдать положение самолета относительно позиционной линии по планкам положения на приборе. По темпу приближения планки курса к индексу ВПП можно своевременно определить изменение угла сноса и внести поправку в курс выхода на ВПП. При этом не следует пренебрегать контролем положения самолета относительно позиционной линии по показаниям АРК: при нахождении вблизи позиционной линии стрелки АРК параллельны или их усредненные показания примерно одинаковы. Надо помнить, что на работу КГС могут оказывать влияние многие посторонние факторы, а АРК вблизи привода, в общем, менее подвержены помехам. Комплексный контроль курса более надежен, и опытный экипаж всегда контролирует работу КГС по радиокомпасам.
При пилотировании по планке курса углы выхода незначительны: 2-3 градуса. Все внимание пилота сосредоточено на выдерживании угла упреждения, контроле и коррекции по курсовой планке. Второй пилот контролирует положение самолета по АРК.
Заход в директорном режиме.
Заход в автоматическом режиме.
Автоматический заход на посадку отличается от директорного тем, что функцию удерживания командных стрелок в центре прибора выполняет автопилот. При этом имеется возможность использования автомата тяги для выдерживания приборной скорости, что разгружает КВС от управления этим важнейшим параметром полета.
Установка ПМПУ экипажем перед заходом так же обязательна. Необходимо постоянно помнить о том, что ПМПУ на приборе должен соответствовать рабочему курсу посадки.
Для качественного выполнения автоматического захода на посадку экипаж от начала 4-го разворота и до входа в глиссаду должен иметь достаточный запас времени, используемый для проверки соответствия поведения самолета предполагаемым режимам:
- соответствует ли сторона разворота ожидаемому направлению;
- соответствует ли крен на развороте рекомендациям РЛЭ;
- движется ли самолет по директорным стрелкам в зоне радиомаяков, определяемой по планкам навигационного прибора;
- успевает ли самолет при провороте автоматически выйти на позиционную линию до входа в глиссаду;
- подтверждают ли резервные системы (ОСП, РСП) движение самолета в равносигнальной зоне;
- нет ли раскачки по курсу и тангажу;
- подобран ли режим работы двигателей для горизонтального полета перед входом в глиссаду.
При заходе по любой системе важнейшую роль играют следующие факторы:
- серьезная предпосадочная подготовка, особенно в условиях минимума погоды;
- распределение обязанностей и взаимодействие на заходе;
- строгое выполнение технологии работы экипажа;
- взаимоконтроль;
- уверенность в своем профессионализме;
- спокойная, деловая обстановка в кабине;
- постоянная готовность к уходу на второй круг;
- оценка обстоятельств захода и действий всех членов экипажа с точки зрения здравого смысла.
Все существующие системы захода на посадку требуют, чтобы самолет был предварительно выведен на направление оси посадочной полосы, то есть чтобы был выполнен начальный этап захода на посадку, целью которого является вывод самолета в зону действия посадочной системы.
Процесс привода самолета на аэродром для посадки состоит из следующих этапов:
– этапа вывода самолета в заданную точку, из которой начинается построение маневра для захода на посадку;
– начального этапа захода на посадку, то есть предпосадочного маневра, который заключается, как правило, в выполнении одного, двух или четырех разворотов для выхода самолета на линию посадки в зону действия посадочной системы;
– заключительного этапа захода на посадку, представляющего собой полет по глиссаде снижения для выхода в точку принятия решения, после прохода которой выполняется визуальная посадка.
Такое деление на этапы обусловлено различием траекторий полета самолета, действий летчика, а также неодинаковым составом используемой аппаратуры.
Для привода самолета на аэродром и захода на посадку с помощью системы ОСП использовались приводная радиостанция и бортовой радиокомпас. С появлением радиолокационной системы посадки (РСП) самолеты выводились на аэродром и заводились на посадку по командам с земли. В настоящее время почти на всех современных самолетах вместе с системами ОСП и РСП применяются радиотехнические системы навигации и инструментальной посадки.
Вспомним вначале порядок использования системы ОСП для захода на посадку.
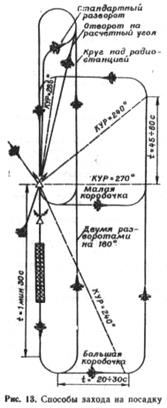
Заход на посадку с использованием приводной радиостанции (ДПРС) может выполняться следующими типовыми способами (рис. 13): стандартный разворот, отворот на расчетный угол, круг над радиостанцией, большая коробочка, малая коробочка, двумя разворотами на 180°.
Все эти способы основаны на построении определенного маневра после прохода ДПРМ, являющейся исходной точкой маневра.
Первые два способа можно условно определить как маневры в вертикальной плоскости, так как они выполняются в плоскости, проходящей по оси ВПП (если не учитывать радиус разворота на посадочный курс).
При заходе способом стандартного разворота самолет проходит от ДПРС с курсом, обратным посадочному, до истечения заданного времени; после этого выполняется стандартный разворот на 180° (то есть с предварительным отворотом на 80°) для выхода в створ ВПП.
При заходе с отворотом на расчетный угол после прохода ДПРМ берется курс, обратный посадочному, с поправкой на угол отворота с таким расчетом, чтобы по истечении заданного времени самолет вышел в точку разворота на 180° с выходом на линию курса на нужной дальности.
Далее на посадочной прямой выполняется снижение по определенной программе, о чем будет сказано ниже.
Другую группу способов, основным из которых является большая коробочка, можно определить как маневры в горизонтальной плоскости. При этом способе выполняется полет по прямоугольному маршруту относительно ВПП с выполнением четырех разворотов. Исходной точкой также является ДПРС, после прохода которой берется курс, равный посадочному. В процессе предпосадочного маневра может выполняться снижение для выхода на высоту круга.
Разновидностями способа захода на посадку по большой коробочке являются способы захода по малой коробочке, двумя разворотами на 180° и круг над радиостанцией. При последнем способе, в отличие от предыдущего, первый разворот на 180° выполняется сразу после прохода ДПРС с курсом, близким к посадочному; в остальном по траектории полета они не отличаются.
На самолетах-истребителях чаще всего использовались способы захода на посадку отворотом на расчетный угол и круг над радиостанцией в зависимости от того, с каким курсом относительно ВПП самолет вышел на ДПРС (при наличии радиолокационного контроля с земли используется также метод захода с рубежа снижения, но мы его здесь не рассматриваем). Обусловлено это относительной простотой техники пилотирования при заходе этими способами, так как развороты над ДПРС и на посадочный курс, как правило, выполняются над облаками. Однако эти способы, как и способ стандартного разворота, имеют, на наш взгляд, следующие существенные недостатки по сравнению со способом захода на посадку по большой коробочке.
Время и дальность горизонтального полета с курсом, обратным посадочному, зависят от высоты и скорости полета, а также от ветра. Это приводит к необходимости иметь на командном пункте специальные таблицы и графики, различные для самолетов разных типов, и передавать требуемые данные на борт самолета по радио. Для обеспечения нормального захода в течение всего маневра требуется точное выдерживание заданных величин скорости полета, крена на развороте и вертикальной скорости снижения в зависимости от высоты полета. При большой высоте выхода на ДПРС самолеты выполняют разворот на посадочный курс на большом удалении от аэродрома. Это увеличивает потребную аэродромную зону. которая не всегда может быть обеспечена из-за близости трасс Аэрофлота. Определить свое местонахождение и информировать о нем командный пункт и другие самолеты летчик может только при пролете ДПРС, поэтому командный пункт практически не может контролировать взаимное положение нескольких самолетов по докладам летчиков (если не используется диспетчерский радиолокатор).
При полете по большой коробочке маршрут практически не зависит от типа самолета и скорости полета. Параметры большой коробочки и размеры потребной аэродромной зоны мало зависят также и от высоты начала построения маневра. Командный пункт имеет возможность контролировать местоположение самолетов по докладам летчиков о выполнении разворотов и прохождении траверза ДПРС, что позволяет выполнять заход на посадку одновременно разным типам самолетов. Если временной интервал между самолетами, заходящими на посадку по большой коробочке, чрезмерно уменьшился, его можно скорректировать: догоняющий самолет может выполнить развороты (кроме четвертого) позднее. Правда, заход по большой коробочке требует несколько большего расхода топлива, когда он весь выполняется на высоте круга. Однако если при возвращении с задания на большой высоте не снижаться до прохода ДПРС, а терять высоту постепенно, в процессе построения маневра по большой коробочке, то есть так, чтобы выйти на высоту круга примерно к третьему развороту, расход топлива будет не больше, чем при заходе способом отворота на расчетный угол. Кроме того, имея хотя бы приближенную информацию о дальности до аэродрома, заход на посадку по большой коробочке (вернее, по ее части) можно выполнить и без предварительного прохода ДПРМ, так как сочетание показаний указателя КУР и компаса дает возможность выхода в район второго или третьего разворота сразу с линии маршрута.
Теперь кратко опишем снижение после разворота на посадочную прямую. При заходе способом отворот на расчетный угол или круг над радиостанцией снижение выполняется с определенной вертикальной скоростью в зависимости от высоты полета. С высоты 1000 м вертикальная скорость уменьшается до 5-7 м/с. При точном определении ветра и выдерживании времени и скорости полета от ДПРМ с курсом, обратным посадочному, и точном выдерживании вертикальной скорости снижения и скорости полета по траектории самолет должен снизиться на установленную безопасную высоту (обычно 200 м) за 30 с полета до ДПРМ. Затем выполняется горизонтальный полет (площадка) до прохода ДПРМ. При отклонениях в выдерживании режима полета или неточном учете ветра самолет может выйти на установленную высоту дальше или ближе относительно ДПРМ. Горизонтальная площадка и предназначена для компенсации возможных отклонений. Такая схема снижения была разработана тогда, когда еще не было радиолокационного контроля за заходящими на посадку самолетами. С появлением диспетчерских радиолокаторов стало возможным контролировать полет самолетов в районе аэродрома и информировать летчиков о дальности до ВПП. Зная дальность, летчик может установить такой режим снижения, чтобы выполнить основную задачу этого участка захода – выйти к ДПРС на установленной высоте полета.
С появлением системы РСП появилась возможность с помощью посадочного радиолокатора полностью контролировать снижение самолета по глиссаде по высоте и направлению и подачей соответствующих команд уточнять его. Программа снижения с горизонтальной площадкой перед ДПРС изжила себя; она стала не только ненужной, но даже в какой-то степени вредной, нарушающей нормальный, установившийся режим снижения. Однако эта программа снижения еще некоторое время применялась – по привычке или по традиции. Необходимо отметить, что при использовании инструментальной курсоглиссадной системы захода на посадку такая программа снижения совершенно исключается.
При заходе на посадку по большой коробочке режим предпосадочного снижения несколько проще, так как он начинается с высоты 600 м – высоты четвертого разворота (предварительное снижение до третьего или даже четвертого разворота может быть произвольным). Если нет радиолокационного контроля, снижение начинается сразу после четвертого разворота, и в этом случае приходится выполнять площадку на установленной безопасной высоте перед ДПРС. Если есть радиолокационный контроль и имеется информация о дальности до ВПП, снижение начинается на удалении 12 км (что при высоте 600 м соответствует нормальной глиссаде), и горизонтальная площадка исключается.
Несмотря на ряд существенных преимуществ способа захода на посадку по большой коробочке, на самолетах-истребителях широко применялись способы отворот на расчетный угол и круг над радиостанцией, так как техника пилотирования в этих случаях, как было указано раньше, проще. Это не давало больших преимуществ, но и не создавало затруднений при полетах в сложных метеорологических условиях.
Самолет выполняет полет в автоматическом или директорном режиме управления по маршруту, который совпадает с заключительной частью маршрута большой коробочки (в случае повторного захода они полностью совпадают).
Таким образом, в связи с широким внедрением системы РСБН практически на все типы самолетов назрела необходимость перехода на способ захода на посадку по большой коробочке. Это целесообразно даже в тех случаях, когда система РСБН не используется; только так будет обеспечено единообразие и облегчится переход летчиков на самолеты, оборудованные системой РСБН. Конечно, при использовании курсоглиссадной посадочной системы можно в принципе применить и способ захода отворотом на расчетный угол, при котором после разворота на посадочный курс самолет попадает в зону действия курсоглиссадных маяков. Однако при этом не будут использованы возможности РСБН по инструментальному построению маневра для захода на посадку, значительно облегчающие работу летчика и повышающие безопасность полета.
Читайте также: