
Валидация схем захода на посадку
Обновлено: 08.07.2024
Возник вопрос - как пилоты находят полосу, ведь видно ее далеко не всегда? А очень просто, хочется ответить на это, но, начиная отвечать, понимаешь, что не так все и просто! Поехали с самого начала, а для примера возьмем, как всегда, наш Airbus A320!
А начнем мы с того, что у нас на A320 есть такая штука как FMGS - Flight Management and Guidance System система управления полетными данными. Эта система имеет картографические данные и легко определяет местоположение самолета по данным трех (!) инерциальных систем . Они достаточно точны, чтобы за несколько часов полета обеспечить точность (у них все равно есть увод, если их не корректировать) в несколько миль. Хотя они корректируются по другим средствам. В основном по GPS, причем, обычно это происходит автоматически. Но даже без коррекции этого вполне достаточно для выхода в район аэродрома. А дальше:
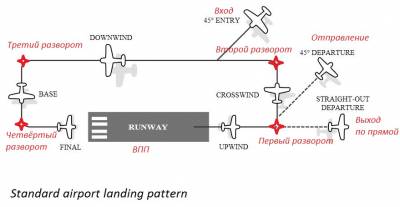
Способ N1. Визуальный заход - Visual Approach.
Способ этот далеко не нов и существует ровно столько же, сколько существует сама авиация. И прост как 3 копейки - находим глазами полосу, отключаем всю автоматику к чертям и летим, управляя самолетом вручную. Просто? Да. Надежно? Очень! Недостатки? Есть. Всего один. Полосу нужно видеть. В идеале - с момента начала снижения (ну, тут я обнаглел, да - за 150 км и с высоты 10 км хрен чего разглядишь!) или, как минимум, с точки входа в глиссаду. Есть условия - запрашиваем разрешение у диспетчера и, при положительном ответе, дальше летим и садимся чисто визуально. Нет условий - выполняем другой заход. С учетом необходимости обеспечения регулярности полетов и наших метеоусловий - воспользоваться им получается ой как редко! Ну и как всегда инженеры подсуетились и придумали нам подсказку - огни PAPI, глядя на которые легко оценить положение самолета относительно идеальной траектории.
Способ N2. Заход с использованием кругового маневрирования - Circle-to-land.
Это ближайший родственник первого способа и применяется когда все-таки есть какие-то условия для визуальной посадки. Но вот сказать, что полосу видно издалека - уже нельзя. В этом случае мы начинаем снижаться на радиомаяк или по ILS (подробнее будет далее), в определенный момент переходим на визуальный полет, выполняем полет "по кругу" и садимся с курсом обратным тому, с которым мы летели изначально.
Ключевой вопрос все тот же - установление визуального контакта. Но возникает вопрос - раз уж мы все равно используем некие технические средства - зачем нам переходить на визуальный полет? Все просто, представьте, что некая ВПП оборудована этими средствами только с одного курса. А по погоде (ветер!) нам нужно садиться с другим. Вот и начинаем крутиться, с соблюдением ограничений. Их два - нельзя снижаться ниже определенной высоты до установления визуального контакта с землей и, очень часто, есть ограничения по зонам визуального маневрирования - покидать пределы этих зон в процессе захода нельзя. Просто ли это? Достаточно просто. Надежно? Вполне. Недостатки? Да те же самые, что и у первого способа - нужны какие-никакие условия. Хотя годятся и чуть худшие, чем при чисто визуальном заходе.
Способ N3. Заход по приводам - NDB Approach.
Способ этот тоже достаточно стар, он существовал уже в 30-е годы 20 века. Достоинство его в том, что он позволяет снижаться не видя земли (до определенного момента). Как это работает? Представьте линию, продолжающую осевую линию ВПП в ту сторону, откуда мы заходим на посадку. На этой линии стоят два радиомаяка - мощных передатчика, работающих на определенной частоте. Стоят они обычно на удалении 1 и 4 км (0,6 и 2,2 мили) от торца полосы. Если иначе - это всегда отдельно оговаривается. А в самолете есть два радиокомпаса, только и умеющих, что указывать стрелками на тот маяк, на который они настроены. И как только обе стрелочки оказываются направлены в одну точку, мы понимаем, что мы находимся по оси ВПП.
Сложность тут в том, чтобы выйти на эту ось на нужном удалении и снижаться с нужной вертикальной скоростью. Впрочем, наша FMGS готова нам подсказать и то и другое, а, если что, требуемые вертикальные скорости обычно публикуются на схемах. Окончательно правильность своего положения контролируем по пролету приводов. Дальний хорошо бы пройти на высоте 200 метров (600-700 футов) , а ближний - 60 метров (200-250 футов). Простой ли это способ? Да так себе, посложнее первых двух. Надежный? Ммм, не очень - легко можно ошибиться, особенно на менее продвинутых самолетах чем наш. Что и случалось иногда, к сожалению.
Есть, кстати, еще вариант захода с использованием всего одного привода. Принципиально он не отличается, просто летим на этот привод с заданным курсом (точнее - путевым углом), в момент его пролета контролируем свою высоту и все - мы в дамках.
Способ N4. Заход на радиомаяк. VOR - approach.
Способ этот очень похож на предыдущий с одним только отличием - если приводной маяк стоял по оси ВПП, то этот стоит рядом с ней, примерно в районе ее центра. Поэтому и заходим мы на него с курсом ОТЛИЧАЮЩИМСЯ от посадочного! Наша задача - увидеть полосу визуально и вовремя довернуть на посадочный курс. Не увидели вовремя - "давай, до свиданья" - уходим на второй круг.
Что объединяет эти способы? А то, что все они являются недостаточно точными, то есть требуют достаточно высоких метеоминимумов. Примерно 600-800 футов, то есть 200-300 метров. Если облачность опускается ниже - извините, но нам дорога на запасной. Снижение ниже минимума без видимости земли это преступление и прямой путь в. отчет о расследовании катастроф. Однако, мы все-таки ухитряемся сесть и при минимальной видимости и даже вообще без нее, для этого применяются так называемые "точные" заходы . Но об этом - чуть позже.
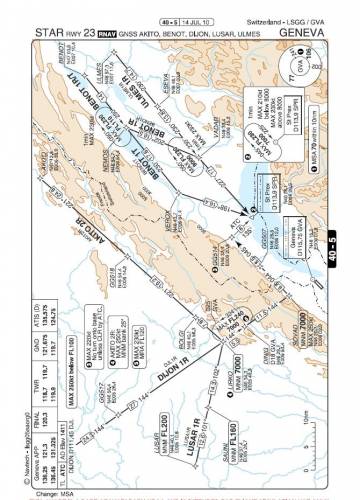
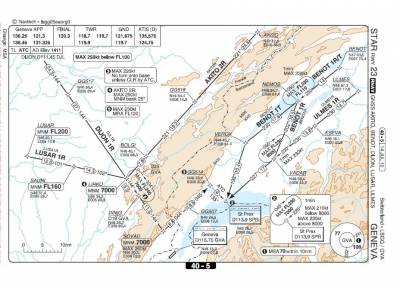
Прежде всего, мы видем карту рельефа местности с обозначением высот (цветом и числовыми значениями). Сверху мы видим название схемы с перечнем описанных здесь схем захода:
STAR rwy 23 RNAV GNSS AKITO, BENOT, DIJON, LUSAR, ULMES.
То есть это схемы прибытия на полосу 23. Тут появились ещё новые термины, которые довольно часто будут встречаться: RNAV и GNSS.
RNAV (Area Navigation) - Зональная навигация. Метод самолетовождения, позволяющий выполнять полет по любому избранному маршруту в пределах радиуса действия радионавигационных систем, или в пределах действия бортовых средств, или в пределах использования комбинации тех и других. Таким образом, маршруты зональной навигации - это такие маршруты, которые установлены для полета воздушных судов, оборудованных средствами зональной навигации (VOR, DME, GPS и другие).
GNSS - Global Navigation Satellite System. Глобальная навигационная спутниковая система. Как навигационный элемент систем управления воздушным движением CNS/АТМ включает в себя сочетания комбинаций следующих составляющих, размещенных на земле, спутниках и на борту ВС: GPS, ГЛОНАСС, бортовая система функционального дополнения (АВАS), спутниковая система функционального дополнения (SВАS), наземная система функционального дополнения (GВАS), бортовой приемник GNSS.
Далее мы видим дату схемы, номер страницы, название аэропорта.
К дополнительной информации относится таблица с частотами радиосвязи, превышение аэродрома AD Elev 1411 фута и эшелон перехода TL ATC. ATC (Air Traffic Control - управление воздушным движением), говорит нам о том, что эшелон перехода назначает диспетчер. Как правило, высота эшелона перехода выше высоты перехода на 1000-2000 футов. Поэтому если нет диспетчеров и иных указаний в схемах, я использую именно эту высоту. А поскольку, как мы уже выяснили, высота перехода в данном аэропорту составляет 7000 футов и на схемах мелькает высота 9000 (а не эшелон FL090), то эшелоном перехода возьмём FL090 (а не FL080).
Как и на предыдущей схеме мы видим круг зоны аэропорта с минимальными высотами:

Указания ограничения скорости максимум 250 узлов ниже FL100 (10000футов QNH):

Масштабная шкала (очень не рекомендуется использовать линейку для ориентирования по схемам, доверяйте только указанным числовым значениям):

И различные сноски, поясняющие особености прохождения помеченных точек пути:

На рисунке:
1) №3 максимальная скорость 220 узлов, третий разворот выполнять только по указанию УВД.
2) №4 AKITO 2R: максимальная скорость 250 узлов, минимальный крен разворота (BANK) 25*.
3) №5 максимальная скорость 230 узлов минимальныя высота вне маршрута FL120.
Ну и конечно же радионавигационные средства (здесь: ВОР маяки):

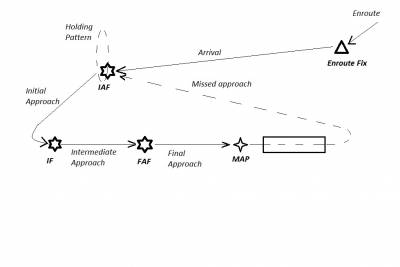
Что собой представляет общая схема захода?
Наш маршрут (Enroute) заканчивается последней точкой маршрута (Enroute Fix). от неё идёт участок прибытия (Arrival) до начальной точки инструментального захода IAF (Initial Approach Fix). С этой точки начинается начальный заход (Initial Approach), на этом участке экипаж начинает подготовку к посадке (сбавляет скорость, выпускает механизацию). Следующая точка - точка начала промежуточного захода IF (Intermediate approach Fix), с которой начинается участок промежуточного захода, на котором экипаж заканчивает подготовку самолёта к посадке (устанавливает посадочную скорость, выпускает механизацию крыла в посадочную конфигурацию, выпускает шасси и прочее). Здесь же происходит захват луча локалайзера (горизонтальная навигация). Далее самолёт проходит точку захвата луча глиссады FAF (Final Approach Fix) и начинает снижение по глиссаде (Final Approach). К 1000 футам по радиовысотомеру заход должен быть сбалансирован (по скорости, по точности следования траектории глиссады). И на высоте принятия решения капитан (MDA/MDH) принимает решения садиться или уходить на второй круг в точке ухода на второй круг MAP (Missed Approach Point). Схема ухода на второй круг так же фиксирована. Это может быть схема по "коробочке" :
либо уход в зону ожидания (Holding Pattern):
Сразу отмечу, что есть два вида инструментальных заходов на посадку:
1. Точный (Precision Approach), в которов используется как горизонтальная навигация (LOCOLIZER), так и вертикальная (Glide Path - Луч Глиссады).
2. Не точный (Тщт-precision Approach), в котором используется только горизонтальная (lateral) навигация.
Эта схема захода начинается точкой ULMES и заканчивается ВОР маяком St Prex, который будет играть роль точки начала промежуточного захода.
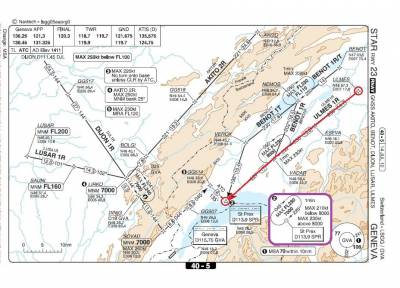
Сразу обратим внимание на сноску №2, касающуюся точки St Prex. С помощью этого ВОР маяка организована зона ожидания. Она используется для ухода на второй круг. Её inbound leg 225*, что совпадает с курсом полосы 23, времы прохождения одной leg 1 минута (для крупных лайнеров 2 минуты), ограничения по скорости: до 210 узлов ниже 8000 футов, 230 узлов - выше 8000 футов.
Однако, зона ожидания используется не только при уходе на второй круг. Здесь нас могут задержать в случае, если полоса занята в момент нашего появления. Иногда подобным образом обозначается стандартный разворот, если из данной точки нужно выйти строго указанным курсом, а мы подходим к нему со слушком большим углом, тогда нам придётся выполнить разворот Teadrop ("капля") или Parallel ("параллельный"). Подробнее рассмотрим в теме выполнения схем зон ожидания. Так же зону ожидания можно использовать для уменьшения скорости, если она "почему-то" оказалась слишком большой.
Над точкой ULMES нет никаких ограничений ни по скорости, ни по высоте, поэтому её мы проходим согласно наших расчётов.
Далее нам предстоит пройти 14,7 миль курсом 230* до точки ESEVA, которая тоже обозначена лишь координатами. Для неё так же нет никаких ограничений (кроме общего ограничения скорости 250 узлов ниже FL100).
Дальше проходим 13,8 миль прежним курсом 230* в направлении к точке VADAR. Вокруг неё так же организована зона ожидания и ест ограничения по высоте. Это интервал от 9000 футов до FL230.
После точки VADAR левым доворотом мы ложимся на курс 227* и двигаемся 17 миль до точки St Prex, для которой высоты ограничены интервалом 7000 - FL230 и где заканчивается схема нашего захода.
Не смотря на то, что схема разрешает высоту на точке St Prex вплоть до FL230, это не значит, что мы можем быть здесь на этой высоте, ведь сразу за St Prex будет точка входа в глиссаду, а она имеет свою фиксированную высоту. И чтобы узнать, на какой высоте нам нужно быть в этой точке, нам нужно открыть схему финального захода, которые мы сейчас и рассмотрим.
Небольшое примечание о том, как выбирать полосу для посадки. Для поддержания аэродинамических свойств самолёта, ему необходим достаточной силы набегающий воздушный поток, поэтому в этом плане встречный ветер даже приветствуется. Помимо того, встречный поток сносит нас в обратном направлении, в результате чего результирующая (путевая) скорость (ground speed), оказывается меньшей, при том, что аэродинамика самолёта остаётся прежней. Понятно, что чем медленнее будет двигаться самолёт относительно земли на посадке, тем меньшей длины полоса ему потребуется. Конечно на эшелоне встречный ветер будет играть совсем противоположную роль. Исходя из всего сказанного, мы будем выбирать полосу так, чтобы ветер максимально возможно дул нам навстречу. То есть разница курсов полосы и направления ветра (как известно оно подразумевает курс, ОТКУДА дует ветер) было как можно меньшим. Но при этом и прочие характеристики полосы (посадочная длина, "выносливость") должны соответствовать нашему типу ЛА. Это не касается тех аэропортов, где посадка осуществляется только в одном направлении (например, аэропорт Сочи).
Общий обзор.
не стану заострять внимание на уже пройденных нюансах. Буду Говорить о том, что еще не встречалось.
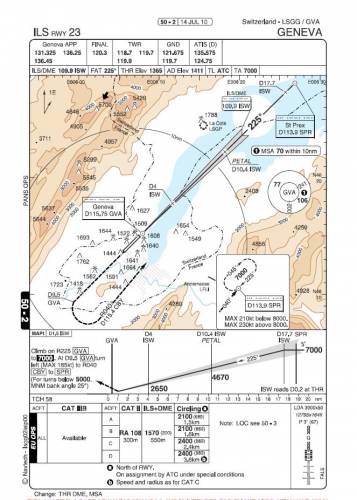
Итак, название схемы ILS rwy 23 - заход на полосу 23 по курсоглиссадной системе.
Далее мы видим частоты диспетчеров.
Ниже дополнительная информация:
ILS/DME 109,9 ISW - частота маяка, которую мы установим себе на навигационном радиоприёмнике, его буквенный код морзе. DME означает, что маяк имеет дальномерное оборудование, то есть мы будем видеть не только планку глиссады, но и удаление от маяка.
Там же FAT 225* - курс, по которому будет осуществляться заход ( в некоторых случаях он не совпадает с курсом полосы, приходится делать доворот на него перед касанием). Его мы установим себе на автопилоте. Фактически, это радиал маяка, как и в случае с ВОР маяками. THR Elev 1411 - превышение торца полосы. AD Elev 1411 - превышение аэропорта (некоторые аэропорты расположены на местности с разными высотами, превышение аэропорта - это его наивысшая точка).
Эшелон и высота перехода.
Далее идёт основной блок, который мы рассмотрим чуть позже.
Ниже - профиль финального захода и инструкция ухода на второй круг.
И в самом низу посадочные минимумы - высоты принятия решения (от уровня моря и по радиовысотомеру) в зависимости от типа и категории посадки.
И в правом нижнем углу - схемка огней, по которым осуществляется заход в ночное время или при низкой видимости, а также размеры полосы и угол наклона глиссады - тот угол, который позволяют выдерживать эти огни.
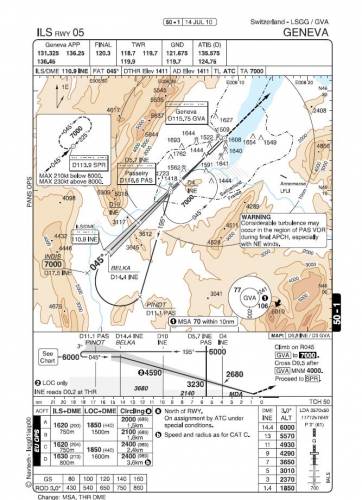
Общий обзор самой схемы.
тут мы снова видим карту с рельефом местности и государственной границей, круг радиусом 10 миль. Заметьте, внутри круга ограничение по высоте: минимальная высота 7000 футов (от уровня моря). Навигационные средства (вор маяки), полосу и собственно схему захода (сплошной чертой) и схему ухода на второй круг (пунктир).
Здесь же нам дана схема выполнения зоны ожидания, высота и ограничение скорости в этой зоне, её inbound leg (225*) и курс входа в зону 040* (такой вход подразумевает стандартный разворот "каплю").

В левом верхнем углу мы видим MARt D1,5 ISW, что означает, что точка принятия решения удалена от курсоглиссадного маяка (сокращенное имя ISW) на 1,5 мили. В правом нижнем углу нам говорят, что курсоглиссадный маяк читается на расстоянии 0,2 мили от торца полосы.
Внизу мы видим шкалу удаления от торца полосы в морских милях.
Угол наклона глиссады 3* - стандартный:

Сверху мы видим основные используемые точки и их удаления.
Итак, выполнение схемы посадки.
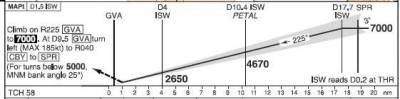
Мы должны подойти к ВОР маяку SPR на высоте 7000 футов (от уровня моря)и двигаться от него курсом 225*. На удалении 17,7 миль от ISW (маяк ILS, на который мы настроили навигационное радио) мы начинаем снижение по глиссаде. Далее даны контрольные точки:
PETAL - удаление 10,4 мили от ISW - здесь мы должны быть на высоте 4670 футов (от уровня моря).
Удаление 4 мили от ISW - здесь мы должны быть на высоте 2650 футов (от уровня моря).
Дальше мы пройдём высоту принятия решения (разберём чуть ниже) и в случае необходимости на расстоянии 1,5 миль от ISW уйдём на второй круг (пунктир).
Схема ухода на второй круг, а вернее, здесь нам предписана зона ожидания, если диспетчер не даст иных указаний:

В случае ухода на второй круг, в точке ухода на второй круг (1,5 мили от ISW), набирайте высоту 7000 футов, продолжая движение курсом 225* по маяку GVA (что соответствует курсу полосы, но на этот случай мы предварительно введем и частоту маяка GVA на втором навигационном приёмнике). На удалении 9,5 миль от GVA выполняем правый разворот с максимальной (приборной) скоростью 185 узлов и захватываем радиал 040* по ВОР маяку CBY (Chambery), частоту которого мы так же вводим в запасное окошко первого навигационного радиоприёмника. И двигаемся этим курсом 040* до маяка SPR.
Все развороты ниже высоты 5000 футов должны осуществляться с креном не менее 25*.
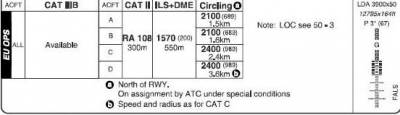
Как мы можем видеть, существует несколько разновидностей захода по данной схеме.
Заход категории III B по метеоминимумам (облачность 50 футов, видимость 50 метров) - это автоленд, и наш аэропорт сертифицирован для такого типа посадок. Одинаково для всех типов ЛА (по скорости захода), не имеет высоты принятия решения. "Пан или пропал".
Посадка категории II (облачность 100 футов, видимость 350 метров) - высота принятия решения 108 футов по радиовысотомеру (от уровня земли), видимость 300 метров для всех типов ЛА.
Посадка по ILS-DME (наш случай) - высота принятия решения (M)DA = 1570 футов от уровня моря или DH = 200 футов от уровня торца ВПП (DA=DH+превышение торца ВПП).
Circling to land или визуальный заход: по категориям:
A (Vref
Рассмотрю кратко только некоторые отличительные моменты.
Для выполнения данного захода нам понадобятся два маяка:
1) основной, курсоглиссадный маяк (INE), его частоту 110,9 мы накручиваем на первом навигационном радиоприёмнике, не забывая включить индикацию расстояния (DME),
2) вспомогательный, вор маяк PAS (Passeiry), его частоту 116,6 накручиваем на втором навигационном радиоприёмнике.
Высоту принятия решения смотрим согласно категории нашего ЛА (по скорости) для соответствующего типа захода, сейчас это ILS+DME. Например, для категории С (B737) это 1620 футов от уровня моря или 204 фута по радиовысотомеру.
Итак, Мы должны пройти вор маяк PAS (jy расположен на расстоянии 5,7 миль от INE - курсоглиссадного маяка ILS) на высоте 6000 футов и двигаться курсом 195*до точки PINOT или удаления 11,1 мили от PAS, пройдя эту точку выполняем правый разворот и захватываем локалайзер ILS (INE) по радиалу 045* в точке BELKA (на удалении 14,4 мили от INE), эта точка так же является точкой захвата глиссадного луча и начала снижения. Дальше всё как и в предыдущей схеме, снижаемся по лучу, сверяем высоты на соответствующих удалениях. На высоте принятия решения - решаем садиться или уходить на второй круг в точке ухода (0,9 миль от INE или 3 мили от GVA).


И новое название захода LOC+DME.
Что же это значит?
Это тоже заход по курсоглиссадной системе (ILS), которая, как мы уже знаем, имеет две составляющие:
1) горизонтальная навигация (как любой ВОР маяк) - LOC (LOCALIZER)
2) вертикальная навигация (луч глиссады) - GP (Glide Path).
Существуют маяки, которые заводят самолёт на полосу только в горизонтальной плоскости, как ВОР маяк. Если в курсоглиссадном маяке отбросить функцию глиссады, например, если она вышла из строя или на борту это оборудование отсутствует или не работает, то мы получаем LOCALIZER. И по нему можно осуществить посадку, вот только за высотой придётся следить нам самим. Существуют заходы, где мы высоту контролируем по удалению (DME) и заходы, где вместо расстояние мы используем время. В данном случае нам даны расстояния и соответствующие им высоты:
Расстояние измеряется от маяка INE (это курсоглиссадный маяк\ILS ВПП 23), высоты относительно уровня моря. То есть, на удалении 14,4 мили (точка начала снижения) мы должны быть на высоте 6000 футов, на удалении 13 миль - 5570 миль и так далее следим вплоть до последнего значения 1,4 мили - 1850 футов. Следующей контрольной высотой будет высота принятия решения, с которой мы должны установить устойчивый визуальный контакт с полосой или уйти на второй круг.
Но при снижении для нас становится значимым ещё один показатель - вертикальная скорость (VS - vertical speed или ROD - rate of descent). Понятно, что вертикальная скорость находится в прямой зависимости от путевой скорости относительно земли (GS - ground speed): чем быстрее мы движемся относительно земли (НЕ приборная скорость. ), тем быстрее мы должны снижаться. Но так как скорость на финальном заходе должна быть постоянной, то ей будет соответствовать постоянная вертикальная скорость. Нам в помощь дана табличка зависимости вертикальной скорости (ROD) от путевой (GS) при данном угле наклона глиссады 3* (для другого угла значения будут другими!):
Таким образом, если мы движемся со скоростью (относительно земли) 140 узлов, то наша вертикальная скорость составит 750 футов-в-минуту. При скорости 150 узлов, вертикальная будет равна 805 футам-в-минуту.
Аналогичный заход имеется и для полосы 23, чему отведена отдельная схема:
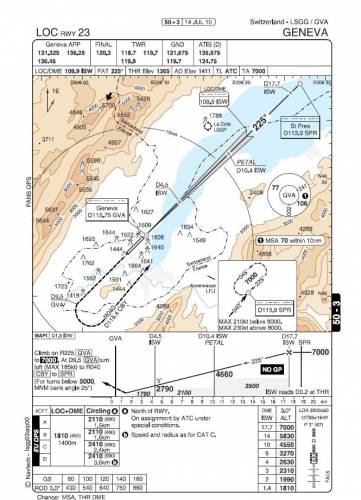
Обратите внимание на эту пометку:

NO GP = NO GLIDE PATH, то есть НЕТ ГЛИССАДНОГО ЛУЧА (пути). Рассчитывать вертикальный путь придётся самим, используя приведённые таблицы.

Банковскими картами
Сервисом Яндекс.Деньги
Qiwi Кошелек
Оплата по выставленному счету.
Оплата банковской квитанцей
Наличными при получении
Наша компания предлагает разработать процедуры маневрирования в районе аэродрома для воздушных судов всех категорий на всех этапах полета:
Разработка стандартных маршрутов вылета по приборам (SID)
- С применением традиционных средств навигации (LOM (ДПРМ), LMM (БПРМ), NDB (ОПРС), VOR/DME (РМА/РМД), SRNS (РСБН))
- Маршрут стандартного вылета по приборам (SID)
- Карта стандартного вылета по приборам (SID) (ИКАО) с применением RNAV (GNSS)
- Маршрут стандартного вылета по приборам (SID) RNAV (GNSS)
- Карта стандартного вылета по приборам (SID) (ИКАО) RNAV (GNSS)
- Координаты точек пути по RNAV (GNSS)
Разработка стандартный маршрутов прибытия по приборам (STAR)
- С применением традиционных средств навигации (LOM (ДПРМ), LMM (БПРМ), NDB (ОПРС), VOR/DME (РМА/РМД), SRNS (РСБН))
- Маршрут стандартного прибытия по приборам (STAR)
- Карта стандартного прибытия по приборам (STAR) (ИКАО)
- С применением RNAV (GNSS)
- Маршрут стандартного прибытия по приборам (STAR) RNAV (GNSS)
- Карта стандартного прибытия по приборам (STAR) (ИКАО) RNAV (GNSS)
- Координаты точек пути по RNAV (GNSS)
- С применением радарного векторения
- Маршрут стандартного прибытия (STAR) (ИКАО) RAD
- Карта стандартного прибытия (STAR) (ИКАО) RAD
Разработка схем захода на посадку по приборам с /без FAF и с/без SDF
- с применением традиционных средств навигации (2NDB (ОСП), LOM (ДПРМ), LMM (БПРМ), NDB (ОПРС) обратного старта, LOC (КРМ), VOR/DME (РМА/РМД), SRNS (РСБН))
- Карта захода на посадку по приборам (ИКАО)
- С применением RNAV (GNSS), RNP APCH
- Карта захода на посадку по приборам (ИКАО) RNAV (GNSS)
- Карта захода на посадку по приборам (ИКАО) LNAV/VNAV
- Карта захода на посадку по приборам (ИКАО) GLS (ЛККС)
- С применением курсоглиссадной системы посадки РМС
- Карта захода на посадку по приборам (ИКАО) ILS
- Расчет MSA (БВП), зоны ожидания, карт РА, ATC SMAC и ВЗП
- Карта района (ИКАО)
- Карта минимальной абсолютной высоты наблюдений УВД (ИКАО)
- Карта визуального захода на посадку (ИКАО)
- Circle-to-land
Отчеты по расчетам схем маневрирования предоставляются в бумажном и/или электронном (CD) варианте.
При желании предоставляются расчеты схем маневрирования в формате AIXM 5.1.
Таким образом наша компания выполняет весь комплекс процедур:
![[image]](https://pics.aviaport.ru/cache/news/300x/557539.jpg)
2 февраля 2017 года начала свою историю новая структура воздушного пространства Санкт-Петербурга. Один из авиадиспетчеров в соцсетях поделился своими впечатлениями после внедрения QNH и Point Merge в аэропорту Пулково: "Наше небо теперь имеет новые трассы, точки, новые схемы прибытия и вылета, Point Merge, ниже эшелона перехода используются футы, а не метры, и давление QNH". Отметил и сам переход с одной структуры на другую: "Пилоты пока обновляют свеженькие воздушные пути, а мы работаем с новым пространством, смотрим на реальное движение и полеты в цифровом небе".
Переход на QNH
Рассказывает Андрей Кудрявцев, заместитель директора по ОрВД и ИВП филиала "Аэронавигация Северо-Запада" Федерального государственного унитарного предприятия "Государственная корпорация по организации воздушного движения в российской Федерации":
- Ровно пять месяцев назад от этой даты - 2 сентября 2016 года - Росавиацией было принято решение о реализации в филиале "Аэронавигация Северо-Запада" ФГУП "Госкорпорация по ОрВД" пилотного проекта по переходу на давление, приведенное к уровню моря по стандартной атмосфере (QNH), при полетах ниже эшелона перехода в районе аэродрома Санкт-Петербург (Пулково). Проект так и назывался - "Пулково QNH".
Традиционно все началось с разработки плана и временного графика основных организационно-технических мероприятий по переходу на QNH. По реализации проекта проделан большой объем работы: проведена корректировка ранее разработанных схем маневрирования в районе аэродрома Пулково, изменена структура воздушного пространства в границах Санкт-Петербургского и Вологодского РЦ ЕС ОрВД для сопряжения маршрутов ОВД с новыми схемами маневрирования и изменяемым районом аэродрома Пулково.
Северо-Западный региональный центр аэронавигационной информации выполнил работу по оценке влияния новых аэронавигационных данных на схемы маневрирования в районе аэродрома Пулково с учетом перехода на QNH и внесения изменений в схемы маневрирования с учетом изменения структуры воздушного пространства Санкт-Петербургской зоны ЕС ОрВД.
- построены бесконфликтные траектории отправления и прибытия SID/STAR;
- организованы изолированные зоны ожидания;
- применены технологии регулирования очередности заходов на посадку Point Merge;
- применены параллельные взлетно-посадочные операции.
Проведены мероприятия по доработке технических средств УВД. В филиале совместно с производителями оборудования - АО "Азимут" и ООО "Фирма НИТА" проведена работа, в ходе которой подтверждены функциональные возможности КСА УВД "Галактика", используемой в районе аэродрома Пулково при выполнении полетов по QNH. Доработка КСА УВД "Альфа" в Санкт-Петербургском районном центре ЕС ОрВД потребовалась только в связи с изменениями структуры воздушного пространства, для чего разработчикам систем УВД была направлена база данных по измененной структуре воздушного пространства в формате ARINC.
Одновременно с реализацией технической части проекта проводилась подготовка персонала обслуживания и планирования воздушного движения в Санкт-Петербургском и Вологодском центрах ОВД. В Санкт-Петербургском зональном центре ЕС ОрВД для работы в условиях измененной структуры ВП и в связи с переходом на выполнение полетов по QNH, были разработаны новые схемы маневрирования с процедурой регулирования очередности заходов на посадку Point Merge: утверждены программы, разработаны упражнения для тренажерной подготовки, методический материал, подготовлены инструкторы.
Схемы маневрирования в районе аэродрома Пулково SID/STAR и захода на посадку по приборам, за исключением конечного этапа захода на посадку, построены согласно спецификации RNAV1 (GNSS) в соответствии с программой "Организация воздушного движения при переходе к использованию наземных систем функционального дополнения GBAS (ЛККС)". Проведено обучение персонала аэроузлового диспетчерского центра и аэродромно-командного диспетчерского пункта Санкт-Петербургского центра ОВД.
Подготовлен "Порядок ОВД при выполнении тестовых полетов по схемам маневрирования аэродрома Санкт-Петербург (Пулково) в измененной структуре ВП с использованием давления QNH". После опубликования в АИП РФ циркуляра по выполнению тестовых полетов по новым схемам 05/16 (4 STAR, 4 SID), с 29.11.2016 по 15.01.2017 авиакомпания "Россия" выполнила 19 тестовых полетов по новым схемам маневрирования без замечаний и отметила, что поддерживает переход на новую структуру воздушного пространства в районе аэродрома Пулково с использованием QNH ниже эшелона перехода.
В январе 2017 года в АИП РФ была опубликована Поправка 02/17 о новых схемах маневрирования в районе аэродрома Пулково с датой ввода 2 февраля 2017 года. Перед этим самолетом-лабораторией филиала "Аэроконтроль" выполнена летная валидация схем.
После завершения всей работы в филиале был издан приказ от 30.01.2017 №35 "Об организации обслуживания воздушного движения с использованием измененной структуры маршрутов ОВД Вологодского и Санкт-Петербургского РЦ ЕС ОрВД и давления QNH в районе аэродрома Санкт-Петербург (Пулково)". С 00:00 UTC 2 февраля 2017 года произведен успешный переход на выполнение полетов по новым процедурам. При этом все экипажи ВС, выполняющих полеты в Пулково, положительно восприняли переход на новую структуру воздушного пространства с применением Point Merge и QNH ниже эшелона перехода - они отмечают значительное упрощение процедур ведения радиосвязи и снижение нагрузки на экипаж, что положительно влияет на повышение уровня безопасности полетов.
Внедрение Point Merge System
О процедурах маневрирования в районе аэродрома Пулково рассказывает Эльмар Александров, заместитель начальника службы движения Санкт-Петербургского центра ОВД:
- В рамках "Пулково QNH" внедрено несколько современных процедур ОВД, среди которых выполнение полетов с использованием давления QNH, назначение высот ниже эшелона перехода в футах, использование стандартных маршрутов прибытия по Point Merge.
Обращение к набирающей популярность в Европе технологии ОВД Point Merge было обусловлено устойчивой тенденцией роста пассажиропотока в аэропорту Пулково.
Преимуществом системы Point Merge по сравнению с векторением - традиционно основным методом регулирования очередности заходов на посадку в периоды повышенной ИВД, является уменьшение объема радиообмена между диспетчером и летными экипажами. Маршрут прибытия технологии Point Merge имеет участок задержки (sequencing leg), по которому прибывающее ВС следует без дополнительных указаний диспетчера. При необходимости регулирования очередности заходов методом векторения диспетчер задает последовательно 3-5 значений курса, чтобы создать интервал, а затем вывести ВС на линию пути маршрута прибытия или схемы захода на посадку. Это требует нескольких сеансов радиосвязи. При использовании Point Merge ВС самостоятельно выходит на траекторию задержки, а когда интервал с предыдущим прибывающим ВС создан, диспетчер дает указание следовать "прямо на" контрольную точку начального или промежуточного участков схемы захода на посадку. Вместо 3-5 сеансов связи в этом случае требуется всего один.
При выборе модели Point Merge System из вариантов Осло, Париж, Дублин за основу для Пулково был выбран Дублин. Расположение участков задержки в створе ВПП, как это было реализовано в Дублине, позволяет более эффективно регулировать очередность заходов по сравнению с траекториями задержки, расположенными на траверзах взлетно-посадочной полосы. Безусловно, и тот и другой варианты имеют свои преимущества и недостатки, предпочтение в выборе должно основываться на особенностях конкретного аэродрома и наличии воздушного пространства, свободного для маневрирования прибывающих ВС.
Диспетчеры АДЦ под руководством инструкторов успешно освоили новый метод на тренажерах. Каких-либо затруднений при переходе на новые маршруты прибытия не возникло. Персонал по достоинству оценил преимущества новой системы и использование траектории задержки с февраля 2017 года стало основным методом регулирования очередности заходов на посадку.
Первая реакция летного состава на внедрение маршрутов прибытия Point Merge в Пулково была настороженной. Высказывались мнения, что лучше бы использовать "тромбоны" как во Франкфурте. Кроме того, обсуждался вопрос заправки ВС дополнительным топливом с учетом удлинившихся маршрутов прибытия, что приводило к перерасходу топлива из-за увеличения массы ВС. Для оптимальной заправки топливом в 2018 году в АИП РФ по Пулково опубликованы маршруты прибытия по кратчайшему расстоянию. Эти маршруты не используются для ОВД, но позволяют производить расчет заправки ВС топливом без учета траекторий задержки. Таким образом, вопрос оптимальной заправки ВС для полета по маршрутам прибытия Point Merge был успешно решен.
Оценивая почти двухлетний опыт ОВД в районе аэродрома Санкт-Петербург (Пулково) с использованием технологии Point Merge, можно с уверенностью сказать, что новая технология показала свою эффективность, нашла положительные отклики как у диспетчеров УВД, так и у пилотов. Благодаря использованию данной процедуры значительно снизились операционные нагрузки на персонал ОВД, повысилась ситуационная осведомленность экипажей ВС в связи с предсказуемостью процедур органа ОВД, снизилось количество радиообмена. Работа по этой технологии позволила персоналу ОВД обеспечить безопасность и эффективность полетов в периоды повышенной интенсивности воздушного движения в 2017 и 2018 годах, а также в период проведения Чемпионата мира по футболу.
Можно с уверенностью сказать, что за Point Merge - большое будущее. Все больше центров ОВД в Европе проявляют интерес к этой технологии и планируют ее внедрение. Положительный опыт работы по Point Merge может быть распространен и в России.
Работу выполняли сообща
Ксения Краснова, заместитель начальника отдела разработки схем маневрирования в районах аэродромов, вертодромов ФГУП "Госкорпорация по ОрВД"
- В рамках проекта "Пулково QNH" большая нагрузка и ответственность легли на плечи сотрудников отдела разработки схем маневрирования в районах аэродромов, вертодромов генеральной дирекции Предприятия в части организационных вопросов и разработки схем полетов по приборам в районе аэродрома Санкт-Петербург (Пулково).
Отделом выполнена наземная валидация стандартных маршрутов вылета, прибытия и захода на посадку с применением метода навигации, основанной на характеристиках (PBN), по навигационным спецификациям RNAV-1 и RNP APCH, совмещенных схем зональной навигации и традиционных средств захода на посадку. Эта работа подразумевала проверку независимым дизайнером разработанных схем полета по приборам на соответствие критериям ИКАО на программно-аппаратном комплексе расчета схем маневрирования с учетом искусственных и естественных препятствий в районе аэродрома (ПАК РСМ).
Результатом наземной валидации стали предложения по корректировке схем маневрирования в районе аэродрома Пулково, опубликованию дополнительной информации на аэронавигационных картах для представления большей ясности экипажам ВС.
Процесс валидации схем является неотъемлемой частью при внедрении схем полетов по приборам и соответствует требованиям документов ИКАО.
Внедрение новых схем полетов по приборам не заканчивается опубликованием разработанных процедур в АИП государства, а включает в себя и получение обратной связи. Так, по запросу Предприятия и Росавиации авиакомпания "Россия" провела опрос экипажей ВС и представила отзывы. Все они положительно восприняли переход на новую структуру воздушного пространства с применением Point Merge и QNH ниже эшелона перехода. Один КВС на вопрос: "Есть ли снижение энергозатрат экипажа при выполнении процедуры по сравнению с предыдущими схемами?" в комментариях написал: "Вопрос риторический?!". Все практические предложения экипажей были учтены при дальнейшей эксплуатации схем.
В данном блоге, выложены работы используемые в методических целях, при обслуживании воздушного движения (ОВД). Цель блога: развивать методическую работу в службе ОВД, внедрять передовые методы, международные стандарты (ИКАО) при обслуживании воздушного движения (ОВД) и использовании воздушного пространства (ИВП) России.
четверг, 24 октября 2013 г.
Визуальный заход (VISUAL APPROACH)
визуальный заход на посадку - заход на посадку при полете по ППП, когда схема захода на посадку по приборам частично или полностью не выполнена и заход выполняется при наличии визуального контакта с наземными ориентирами;
3.87. Визуальный заход на посадку на контролируемом аэродроме выполняется по разрешению органа ОВД после доклада экипажа об установлении визуального контакта с ВПП и (или) ее ориентирами.
Визуальный заход на посадку - заход на посадку при полете по ППП, когда схема захода на посадку по приборам частично или полностью не соблюдается и заход выполняется по визуальным наземным ориентирам.
5.6. Разрешение воздушному судну, выполняющему полет по ППП, на выполнение визуального захода на посадку запрашивается экипажем воздушного судна или инициируется органом ОВД. В последнем случае требуется согласование с экипажем.
5.6.1. При инициировании визуальных заходов на посадку орган ОВД должен учитывать воздушную обстановку и метеорологические условия.
5.6.2. Органом ОВД выдается разрешение на выполнение визуального захода на посадку воздушному судну, выполняющему полет по ППП, при условии:
б) сообщаемая нижняя граница облаков соответствует или превышает высоту, на которой начинается начальный участок захода на посадку воздушного судна, получившего такое разрешение, или
в) экипаж сообщает, что метеорологические условия позволяют выполнять визуальный заход на посадку и посадку.
6.10.6. Орган ОВД может начать векторение воздушного судна для выполнения визуального захода на посадку при условии, что сообщаемая нижняя граница облачности выше установленной минимальной высоты векторения и метеорологические условия позволяют полагать, что визуальный заход на посадку и посадка могут быть выполнены.
6.10.7. Разрешение на выполнение визуального захода на посадку выдается только после доклада экипажа об установлении визуального контакта с ВПП и/или ее ориентирами, после чего векторение прекращается.
Если рассматривать полёты иностранных ВС, сперва следует обратиться к главному авиационному документу - Воздушному кодексу РФ:
1. Международный полет воздушного судна - полет воздушного судна в воздушном пространстве более чем одного государства.
2. Международные полеты воздушных судов в воздушном пространстве Российской Федерации выполняются в соответствии с законодательством Российской Федерации , общепринятыми принципами и нормами международного права и международными договорами Российской Федерации.
4. Международные полеты воздушных судов выполняются на основе международных договоров Российской Федерации или разрешений, выдаваемых в порядке , установленном Правительством Российской Федерации.
5. Опознавательные знаки воздушных судов иностранных государств должны сообщаться эксплуатантами уполномоченному органу в области гражданской авиации до начала выполнения международных полетов.
6. Для выполнения полетов воздушных судов иностранных государств в воздушном пространстве Российской Федерации эксплуатанты обязаны предоставить уполномоченному органу в области гражданской авиации сведения о страховании или об ином обеспечении ответственности за причинение вреда третьим лицам и воздушным судам. Условия такого обеспечения устанавливаются уполномоченным органом в области гражданской авиации.
Подпункт 2 статьи 79 ВК РФ говорит о необходимости соблюдения иностранными пилотами законодательства РФ:
Все Федеральные авиационные правила написаны во исполнение статей главного авиационного закона России – Воздушного кодекса. Например, для ФАП-128, это статьи 67 , 68 , 69 , 71 , 74 , 79 , пункт 2 статьи 87 , пункты 1 и 2 статьи 114 ВК. Для ФАП ОрВД-293, это статья 2 ВК и пункт 134 Федеральных правил использования воздушного пространства РФ. Для ФАП-362, это статья 71 ВК.
Возвращаясь к международным полётам, подпункт 2 статьи 79 ВК РФ указывает необходимость выполнять такие полёты в соответствии с общепринятыми принципами и нормами международного права. (Чикагская Конвенция о международной гражданской авиации, 7 декабря 1944 г .). Но в РФ, все пользователи воздушного пространства обязаны выполнять в первую очередь воздушное законодательство РФ, которое должно быть максимально приближено к Стандартам ИКАО.
6.5.3.1 В соответствии с условиями, изложенными п. 6.5.3.3, разрешение воздушному судну, выполняющем полет по ППП, на выполнение визуального захода на посадку может быть запрошено летным экипажем или выдано диспетчером. В последнем случае требуется согласование с летным экипажем.
6.5.3.2 Диспетчеры принимают меры осторожности при обеспечении визуального захода на посадку, если есть основания считать, что соответствующий летный экипаж не знаком с аэродромом и его окрестностями. При инициировании визуальных заходов на посадку диспетчеры должны также учитывать превалирующее движение и метеорологические условия.
6.5.3.3 Воздушному судну, выполняющему полет по ППП, может выдаваться разрешение на выполнение визуального захода на посадку при условии, что пилот имеет возможность поддерживать визуальный контакт с наземными ориентирами и:
a) сообщаемая нижняя граница облаков соответствует уровню, установленному для начального участка захода на посадку воздушного судна, на котором выдается такое разрешение, или превышает этот уровень; или
b) пилот сообщает, находясь на уровне начального участка захода на посадку, или в любой момент полет по схеме захода на посадку по приборам, что метеорологические условия позволяют достаточно уверенно полагать, что визуальный заход на посадку и посадка могут быть выполнены.
Подпункт 3 статьи 79 ВК РФ отсылает экипажи иностранных ВС готовиться к полёту в воздушное пространство РФ, ознакомившись с данными опубликованными в сборнике аэронавигационной информации. Не лишним будет изучить некоторые положения ФП ИВП-138:
1. Настоящие Федеральные правила, разработанные в соответствии с Воздушным кодексом Российской Федерации и Конвенцией о международной гражданской авиации, подписанной в г. Чикаго 7 декабря 1944 г ., устанавливают порядок использования воздушного пространства Российской Федерации в интересах экономики и обороны страны, в целях удовлетворения потребностей пользователей воздушного пространства, обеспечения безопасности использования воздушного пространства.
2. "аэронавигационная информация" - информация, полученная в результате подборки, анализа и форматирования аэронавигационных данных;
24. Экипажи воздушных судов при выполнении полетов и диспетчеры управления воздушным движением при обслуживании воздушного движения руководствуются данными, опубликованными в аэронавигационной информации.
На основании ст.79 ВК РФ, п.1, 2, 24 ФП ИВП иностранные экипажи выполняют полёты в соответствии с международными нормами, предварительно изучив опубликованные в АИП различия правил и схемы полётов в районах аэродромов.
Российские экипажи обязаны соблюдать требования Воздушного кодекса, выполнять полёты в соответствие с Федеральными правилами ИВП, федеральными авиационными правилами. Согласно п.24 ФП ИВП экипажи и диспетчеры руководствуются данными опубликованными в аэронавигационной информации.
Далее мы изучим положения, опубликованные в сборнике АИП, касающиеся правил полётов с 2.3.1 по 2.3.8., которые описывают действия экипажа, а также действия диспетчера.
Опубликованных схем визуального захода не должно быть. Это может быть карта визуального захода, если нет других карт определенного масштаба. Расчета каких-либо схем, зон визуального маневрирования по категориям ВС и даже минимумов аэродрома не требуется. Визуальный заход выполняется с разрешения органа ОВД либо частично с соблюдением схемы ППП, либо полностью без соблюдения схемы, по усмотрению экипажа ВС, при соблюдении условий п.5.6.1. и 5.6.2 ФАП ОрВД.
Таким образом, схема захода ППП (это может быть СТАР) выполняется частично, или даже полностью не выполняется. Даже сразу после входа в район аэродрома, при соблюдении нескольких условий (см. ниже) и готовности выполнять визуальный заход, экипаж имеет полное право запросить такой тип захода, а диспетчер, имеет полное право разрешить VISUAL APPROACH , или рекомендовать другую систему захода (п.5.6.1. ФАП ОрВД при конфликтном движении или несоблюдении других условий п.5.6.2. ФАП ОрВД).
Данную работу необходимо предоставить для ознакомления руководящего и лётного персонала авиапредприятий.
2. Федеральные правила использования воздушного пространства Российской Федерации, утверждены постановлением Правительства Российской Федерации от 11 марта 2010 г . N 138
13. Наставление по производству полётов гражданской авиации СССР (НПП ГА-85) утв. п риказом МГА СССР от 8 апреля 1985 г . N 77 (утратил силу)
Читайте также: