
Посадка лунохода на луну
Добавил пользователь Alex Обновлено: 18.09.2024
Перед советскими учеными и конструкторами при разработке и создании первого автоматического лунохода встала необходимость решения комплекса сложных проблем. Надо было создать совершенно новый тип машины, способной длительное время функционировать в необычных условиях открытого космоса на поверхности другого небесного тела.
- создание оптимального двигателя с высокой проходимостью при малых массе и энергопотреблении, обеспечивающего надежную работу и безопасность движения;
- создание систем дистанционного управления движением лунохода;
- обеспечение необходимого теплового режима с помощью системы терморегулирования, поддерживающей температуру газа в приборных отсеках, температуру элементов конструкции и оборудования, расположенных внутри герметичных отсеков и вне их (в открытом космосе в периоды лунных дней и ночей), в заданных пределах;
- выбор источников питания;
- материалов для элементов конструкции: разработка смазочных материалов и систем смазок для условий вакуума и многое другое.
Научная аппаратура лунохода должна была обеспечить:
- изучение топографии местности;
- определение химического состава и физико-механических свойств грунта;
- исследование радиационной обстановки на трассе перелета к Луне и на ее поверхности;
- изучение рентгеновского космического излучения;
- эксперименты по лазерной локации Луны.
Первый луноход — советский “Луноход-1″ был доставлен на Луну космическим аппаратом “Луна-17″ и проработал на ее поверхности почти год (с 17.11.1970 по 4.10.1971).

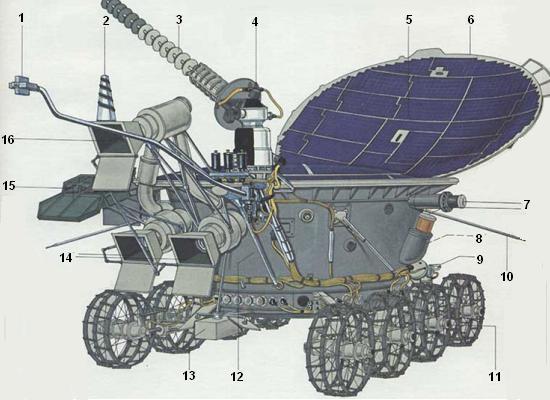
“Луноход-1″ состоит из двух частей: герметичного приборного отсека с аппаратурой и самоходного шасси. Масса “Лунохода-1″ 756 кг, длина (с открытой крышкой) 4,42 м, ширина 2,15 м, высота 1,92 м. Приборный отсек служит для размещения аппаратуры бортовых систем и зашиты ее от воздействия внешней среды в условиях космоса. Имеет форму усеченного конуса с выпуклыми верхним и нижним днищами. Корпус отсека изготовлен из магниевых сплавов, обеспечивающих достаточные прочность и легкость. Верхнее днище отсека используется как радиатор-охладитель в системе терморегулирования и закрывается крышкой. В период лунной ночи крышка закрывает радиатор и препятствует отводу теплоты из отсека благодаря тепловому излучению радиатора. В течение лунного дня крышка открыта, и элементы солнечных батарей, расположенные на ее внутренней стороне, обеспечивают подзарядку аккумуляторов, питающих бортовую аппаратуру электроэнергией.
В приборном отсеке размещены системы терморегулирования, электропитания, приемные и передающие устройства радиокомплекса, приборы системы дистанционного управления и электронно-преобразовательного устройства научной аппаратуры. В передней части расположены: иллюминаторы ТВ камер, электрический привод подвижной остронаправленной антенны, служащей для передачи на Землю ТВ изображений лунной поверхности; малонаправленная антенна, обеспечивающая прием радиокоманд и передачу телеметрической информации, научные приборы и оптический уголковый отражатель, изготовленный во Франции. По левому и правому бортам установлены: 2 панорамные телефотокамеры (в каждой паре одна из камер конструктивно объединена с определителем местной вертикали), 4 штыревые антенны для приема радиокоманд с Земли. Для подогрева газа, циркулирующего внутри аппарата, служит изотопный источник тепловой энергии. Рядом с ним расположен прибор для определения физико-механических свойств лунного грунта.
Резкие температурные перепады при смене дня и ночи на поверхности Луны, а также большая разница температур между деталями аппарата, находящимися на солнечной стороне и в тени, сделали необходимой разработку специальной системы терморегулирования. При низких температурах в период лунной ночи для обогрева приборного отсека автоматически прекращается циркуляция газа-теплоносителя по контуру охлаждения и газ направляется в контур подогрева.
Система электропитания лунохода состоит из солнечных и химических буферных батарей, а также приборов автоматического управления. Управление приводом солнечных батарей осуществляется с Земли; при этом крышка может быть установлена на любой угол в пределах от 0 до 180°, необходимый для максимального использования солнечного излучения.
Бортовой радиокомплекс обеспечивает прием команд из Центра управления и передачу информации с борта аппарата на Землю. Ряд систем радиокомплекса используется не только при работе на поверхности Луны, но и на участке перелета с Земли на Луну. Две ТВ системы лунохода служат для решения самостоятельных задач. Система малокадрового телевидения предназначена для передачи на Землю ТВ изображений местности, необходимых экипажу, управляющему с Земли движением лунохода. Возможность и целесообразность применения такой системы, для которой характерна более низкая по сравнению с вещательным телевизионным стандартом скорость передачи изображения, была продиктована специфическими лунными условиями. Основное из них — медленное изменение ландшафта при движении лунохода. Вторая ТВ система служит для получения панорамного изображения окружающей местности и съемки участков звездного неба, Солнца и Земли с целью астроориентации. Система состоит из четырех панорамных телефотокамер.

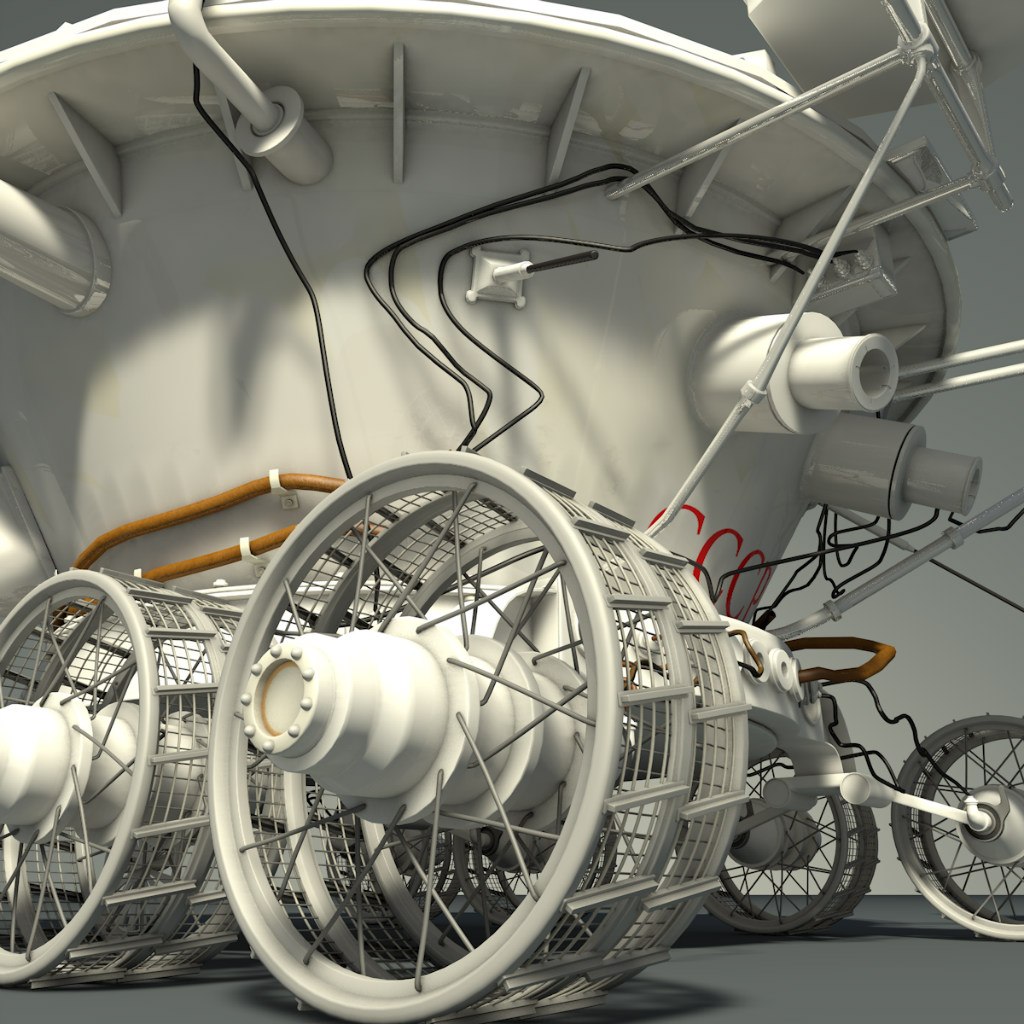
Самоходное шасси предназначено для перемещения лунохода по поверхности Луны. Характеристика шасси: число колес — 8 (все ведущие); колесная база — 170 мм; колея — 1600 мм; диаметр колеса по грунтозацепам — 510 мм; ширина колеса — 200 мм. Шасси выполнено таким образом, чтобы луноход имел высокую проходимость и надежно работал в течение длительного времени при минимальной собственной массе и потребляемой электроэнергии. Шасси обеспечивает передвижение “Лунохода” вперед (с двумя скоростями) и назад, повороты на месте и в движении. Оно состоит из ходовой части (упругая подвеска и движитель), блока автоматики, системы безопасности движения, прибора и комплекса датчиков для определения механических свойств грунта и оценки проходимости шасси. Поворот достигается за счет различной частоты вращения колес правого и левого бортов и изменением направления их вращения. Торможение осуществляется переключением тяговых электродвигателей шасси в режим электродинамического торможения. Для удержания лунохода на уклонах и его полной остановки включаются дисковые тормоза с электромагнитным управлением. Блок автоматики управляет движением лунохода по радиокомандам с Земли, измеряет и контролирует основные параметры самоходного шасси и автоматическую работу приборов для исследования механических свойств лунного грунта. Система безопасности движения обеспечивает автоматическую остановку лунохода при предельных углах крена и дифферента и перегрузках электродвигателей колес.Прибор для определения механических свойств лунного грунта позволяет оперативно получать информацию о движения. Пройденный путь определяется по числу оборотов ведущих грунтовых условиях колес. Для учета их пробуксовки вносится поправка, определяемая с помощью свободно катящегося девятого колеса, которое специальным приводом опускается на грунт и поднимается в исходное положение. Управление аппаратом осуществляется из Центра дальней космической связи экипажем в составе командира, водителя, штурмана, оператора, бортинженера.
Режим движения выбирался в результате оценки телевизионной информации и оперативно поступающих телеметрических данных о крене, дифференте, пройденном пути, состоянии и режимах работы приводов колес. В условиях космического вакуума, радиации, значительных перепадов температур и сложного рельефа местности по трассе движения все системы и научные приборы лунохода функционировали нормально, обеспечив выполнение как основной, так и дополнительных программ научных исследований Луны и космического пространства, а также инженерно-конструкторских испытаний.
“Луноход-1″ детально обследовал лунную поверхность на площади 80000 м2. С помощью ТВ систем было получено более 200 панорам и свыше 20000 снимков поверхности. Более чем в 500 точках по трассе движения изучались физико-механические свойства поверхностного слоя грунта, а в 25 точках проведен анализ его химического состава. Пройденное расстояние 10 км 540 м. Длительность активного функционирования “Лунохода-1″ составила 301 сутки 6 ч 37 мин; прекращение работы было вызвано выработкой ресурсов его изотопного источника теплоты. В конце работы он поставлен на практически горизонтальной площадке в такое положение, при котором уголковый отражатель обеспечил многолетнее проведение лазерной локации его с Земли.

Источник: Большая советская энциклопедия. — М.: Советская энциклопедия. 1969—1978.

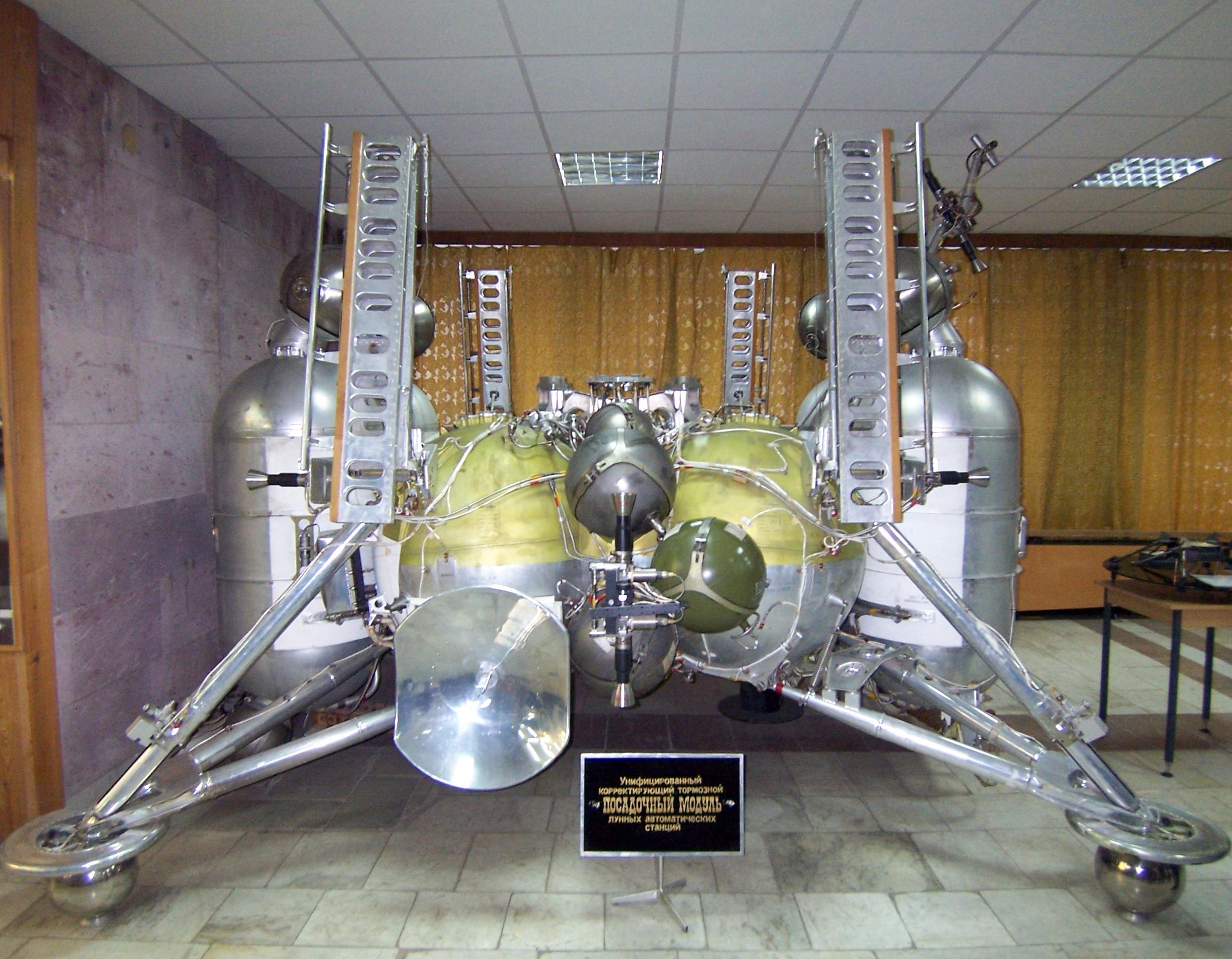
Буксир будет тащить контейнер к Луне целых два года. В качестве груза — или модуль лунной орбитальной станции или автоматический прототип пилотируемого посадочного аппарата.
Дальше ФКП заканчивается и начинаются уже не просто мечты, а самые настоящие фантазии. В 2027 году должна начать летать сверхтяжелая ракета с полезной нагрузкой на низкой околоземной орбите около 80 (или даже 90) тонн. В первом же пуске она отправит беспилотный ПТК НП на окололунную орбиту.

В 2028 на сверхтяжелой ракете должен стартовать к Луне посадочный модуль для пилотируемой экспедиции. В 2029 к нему отправится ПТК НП с экипажем. Но окололунной орбите два КА состыкуются — но экипаж садиться на Луну не будет — этот полет только репетиция экспедиции.

В 2030 стартует второй посадочный модуль и чуть позже — ПТК НП с экипажем. Российские космонавты впервые ступят на лунную поверхность — через 60 лет после американцев!

Вся планета помнит слова и жесты первых людей, шагавших по поверхности Луны, но мы, кажется, стали забывать о небелковых героях освоения Луны — луноходах, первый из которых был советским, а последний — китайским.

Луноход 1

Аполлон 15
Первым пилотируемым аппаратом на Луне стал в 1971 году лунный ровер, на котором катались астронавты Дэвид Скотт и Джим Ирвин. Через несколько минут после начала поездки Скотт начал жаловаться на качку: притяжение Луны было слишком слабо, чтобы удерживать разогнавшийся луноход, и машина подпрыгивала, отрываясь от грунта всеми колёсами сразу. Развивать максимальную скорость было тогда довольно безопасно: во-первых, маршрут был тщательно составлен с учётом всех возможных препятствий, а во-вторых, как отметил в радиопередаче на землю один из пассажиров, не было никакого встречного движения.

Первые луноходы, реализованные в рамках Советской Лунно-посадочной программы пилотируемых полетов (1969–1977 г), должны были обеспечить астронавтам мощную техническую поддержку. Луноходы предназначались для предварительного обследования предполагаемого места посадки жилого модуля, автоматического сбора данных (фото, видео, замеры, пробы грунта); могли использоваться как личный транспорт (оснащались ручным управлением) и как передвижной посадочный радиомаяк.
Первый Луноход: сделано в СССР
Технически, первый луноход, который должен был опуститься на Лунную поверхность в 1969 г, не выполнил задачу из-за аварии ракеты-носителя (головной обтекатель грузового отсека развалился из-за дефицита прочности еще на этапе разгона).
Проектирование
Работа над аппаратами для освоения Луны была начата в 1966 году и шла раздельно: в КБ завода имени Лавочкина (руководитель Бабакин Г. Н.) рассчитывалась и собиралась корпусная часть – гермокорпус, аккумуляторы для солнечных батарей, сами батареи, антенны, камеры, манипуляторы.
Работа над шасси – выполнялась во ВНИИтрансмаш (КБ, проектировавшем танки и военную технику СССР) под руководством А. Л. Кемурджиана.

Обкатка

На территории этой военной части в сентябре 1968 года был организован полигон для обкатки первых планетоходов: котлован площадью 70х120 м, наполненный битым ракушечником. Рельеф сооружения имитировал механические свойства поверхностного слоя лунного грунта (реголита).
Космическая связь тех лет не могла обеспечить качественного гладкого телеизображения. Кроме того, радиосигнал с Луны доходил с задержкой, поэтому решено было сократить частоту передаваемых кадров с обычных 25 в секунду до одного фото в 3–20 секунд.
Луноход 1

- флуоресцентный спектрометр (в рентгеновском диапазоне);
- фиксатор пройденного пути;
- определитель вязкости и твердости материалов;
- дозиметр (РВ-2Н);
- лазерный отражатель (ТЛ).
По бортам лунохода были установлены 6 панорамных телекамер (4 телефотометра и 2 камеры, одна из которых была резервной) и три антенны. Камеры управлялись раздельно, двумя независимыми системами.

Но несмотря на несерьезный вид, первый луноход провел огромную и серьезную научную работу:
- проработал 11 месяцев (вместо 3 расчетных);
- проехал 10,5 км со средней скоростью 2 км/ч;
- произвел точное измерение расстояния между Землей и спутником;
- выполнил 537 физических проб грунта;
- провел химический анализ почвы;
- передал на Землю более 25 тыс. фото и 211 панорамных снимков.
Луноход 2

Официально проект был остановлен 4 июня 1973 года, когда из-за попадания лунной пыли под крышку солнечной панели, температура внутри герметичного отсека поднялась выше расчетной и оборудование перегрелось.
В 1993 году оставшийся в космосе луноход был продан с аукциона Сотбис за 68 500 тыс. долларов.
Луноход 3
Созданный на базе предыдущих платформ, самоходный аппарат должен был нести на себе самые перспективные разработки, включая поворотную стереоскопическую телекамеру, упакованную в гермоблок на отдельном штативе.

Электромобили на Луне: Роверы проекта Аполлон
Облегчавшие астронавтам передвижение в условиях открытого космоса, четырехколесные двухместные открытые платформы были разработаны компанией Boeing.

- длина шасси – 300 см;
- колесная база 230 см;
- диаметр/ширина колес – 810 мм/ 230 мм;
- высота шасси – 110 см;
- дорожный просвет – 350 мм;
- радиус разворота – 3 м;
- масса экипажа – 210 кг;
- полезная нагрузка – 490 кг (для лунного тяготения).
Роверы были оборудованы телекамерой (диаметр объектива 16 мм), и фотокамерой (70 мм), системой связи с Землей, каналом получения и передачи информации с борта спускаемого аппарата. Каждый ровер совершил по три поездки общей дальностью: 27,76км; 26,55 км и 35,89 км.
Китайский луноход Юйту
Малый шестиколесный луноход весил 140 кг (из них всего 20 кг – аппаратура). Фото с китайского лунохода высотой 110 см, длиной 150 см и шириной 100 см планировалось принимать в течение трех месяцев. Расчетная дистанция выезда составляла 10 км.

- панорамные камеры (2 шт.);
- навигационные камеры (2 шт.);
- парктроник (Hazcam);
- георадар, спектрометры (2 шт.);
- манипулятор для спектрометра.
Современные проекты
Для дальнейшего изучения приполярных районов Луны и подтверждения предыдущих высадок космических аппаратов в ближайшем будущем планируется запустить еще несколько экспедиций.
К старту готовятся:

Проект Resource Prospector, модуль ALINA и новый американский луноход The Small Pressurized Rover Concept – предназначенный для исследований Марса – разрабатывались для участия в конкурсе Google Lunar X-Prize, который завершился в марте 2018 года, так и не выявив среди десятка претендентов победителя. Тем не менее, инженеры компании Part-Time Scientists GmbH (ALINA) – не прекращают работы. Предположительно, миссия стартует в 2025 г., в составе совместного проекта Европейского космического агентства.
Читайте также: