
Перевод ткс на аэродром посадки
Обновлено: 08.07.2024
Данный текст я совершенно случайно нашел в своих архивах, хранящихся еще со времен первого Фланкера. Точного авторства и источника указать к сожалению не могу.
Вот что рассказал Панько Александр, который служит в авиации и закончил авиационное училище, об обустройстве аэродромов навигационным оборудованием.
РСБН (радиотехническая система ближней навигации) предназначена для выдачи на борт сигналов по которым определяется азимут и дальность относительно маяка.
ПРМГ (посадочная радио маячная группа) состоит из КРМ и ГРМ.
КРМ (курсовой радио маяк) предназначен для определения на борту смещения от посадочного курса.
ГРМ (глиссадный радио маяк) предназначен для определения на борту смещения от глиссады.
РСП (радиолокационная система посадки) состоит из диспетчерского и посадочного радиолокаторов, предназначена для контроля воздушного пространства вокруг аэродрома и параметров посадки самолетов группой управления полетами.
БПРМ (ближний приводной радиомаяк, отстоит от ВПП на 1км) совместно с ДПРМ (дальний приводной радиомаяк, удален от торца ВПП на 4км) предназнечен для привода ЛА в зону действия ПРМГ, в его состав входят МРМ и КНС. На БПРМ и ДПРМ стоят еще и маркерные радио-маяки, которые своим дествием через звуковой сигнал в кабине отмечают, прохождение приводов (БПРМ и ДПРМ на жаргоне). При этом летчик по получении звукового сигнала должен проконтроллировать свою высоту - на ДПРМ - 200м, на БПРМ - 60м.
МРМ (маркерный радио маяк) предназначен для фиксации на борту пролета над контрольными точками.
КНС (кодонеоновый световой маяк) предназначен для визуальной отметки контрольной точки.
ДРЛГ (дальняя радиолокационная группа) комплекс радиолокационных станций предназначенных для контроля воздушного движения в дальней зоне.
КДП (командно-диспетчерский пункт) сооружение из которого осуществляется централизованное управление воздушным движение в районе аэродрома.
КП (огни конца полосы)
РП (огни разрешения посадки) когда полоса свободна и посадка разрешена огни горят зеленым светом, иначе красным.
ОП (огни подхода)
АГ (огни авиа горизонта) определяют (визуально) курс на полосу, служат для контроля ориентации полосы и отстоят от ее торца на 400-500м
БД (бегущая дорожка) такие бегущие к торцу ВПП огоньки, которые придают посадке большую серъезность :).
- выравнивание обычно начинается на высоте 5-8 м и заканчивается переводом самолета в режим выдерживания на высоте 0.5-1м. В процессе выравнивания вертикальная скорость снижения по глиссаде плавно уменьшается практически до нуля.
- выдерживание применяется для дальнейшего уменьшения высоты полета с постепенным уменьшением скорости и увеличением угла атаки до значений при которых становится возможным приземление и устойчивый пробег самолета. При уменьшении подъемной силы в конце участка выдерживания начинается парашютирование.
- парашютирование - снижение с увеличивающейся вертикальной скоростью. Так как высота парашютирования мала, в момент приземления вертикальная скорость незначительна.
© 2004, 2005 =070=Ghost Yakov Boichenko
© 2004, 2005 =013=Kris Stanislav Gavrovskiy
© 2004, 2005 =074=ivan_sch Ivan Schelkunov
Категории метеоминимумов ИКАО
для точных заходов на посадку и посадок самолетов
Для упрощения формулировок требований к оборудованию самолетов и аэродромов ИКАО определила категории минимумов при инструментальном заходе на посадку и посадке
(Doc 9365. Руководство по всепогодным полетам)
В каждом конкретном случае метеоминимум для посадки определяется исходя из минимумов аэродрома, воздушного судна, командира воздушного судна, по наивысшему из них.
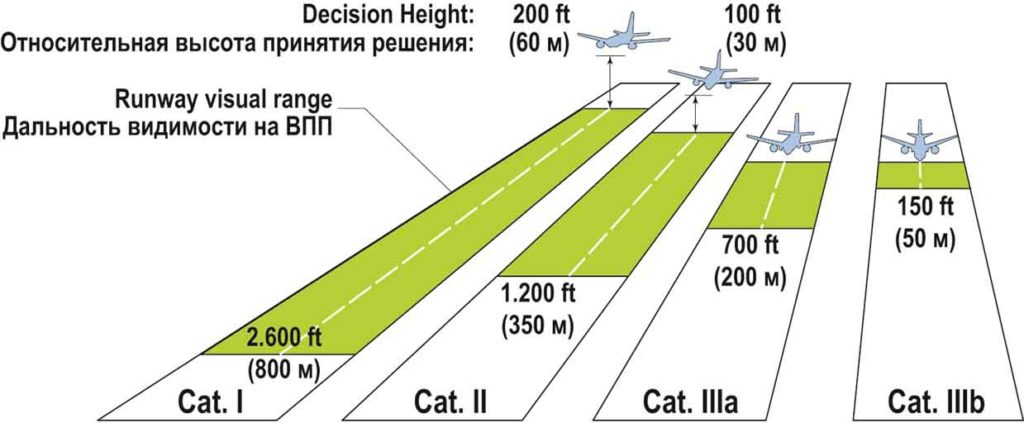
Категория I (Кат. I) — допускается точный заход на посадку и посадка по приборам с высотой принятия решения (DH) не ниже 60 м (200 футов) над ВПП, а также при метеорологической дальности видимости не менее 800 м (2400 футов) или дальности видимости на ВПП (RVR) в зоне приземления не менее 550 м. Самолет, оборудованный в соответствии с I категорией, должен обеспечивать полуавтоматическое снижение до высоты 60 м (200 футов).
Категория II (Кат. II) — допускается точный заход на посадку и посадка по приборам с высотой принятия решения (DH) менее 60 м (200 футов) над ВПП, но не ниже 30 м (100 футов) и при дальности видимости на ВПП (RVR) не менее 350 м (1200 футов). Самолет, оборудованный в соответствии со II категорией, должен обеспечивать автоматическое снижение до высоты предпосадочного выравнивания.
Категория IIIA (Кат. IIIA) — допускается точный заход на посадку и посадка по приборам с высотой принятия решения (DH) менее 30 м (100 футов) над ВПП или без ограничения по высоте принятия решения и при дальности видимости на ВПП (RVR) не менее 200 м (700 футов). Самолет, оборудованный в соответствии с категорией IIIA, должен обеспечивать автоматическое снижение и предпосадочное выравнивание.
Категория IIIB (Кат. IIIB) — допускается точный заход на посадку и посадка по приборам с высотой принятия решения (DH) менее 15 м (50 футов) над ВПП или без ограничения по высоте принятия решения и при дальности видимости на ВПП (RVR) менее 200 м (700 футов), но не менее 50 м (150 футов). Самолет, оборудованный в соответствии с категорией IIIB, должен обеспечивать автоматическое снижение, предпосадочное выравнивание и посадку.
В чем состоит управление вниманием при полете с включенным автопилотом.
Рассмотрим этапы захода на посадку по ILS:
– Погасить скорость от 250 до выпуска механизации
– Выйти на посадочный курс
– Начать выпуск механизации таким образом, чтобы обеспечить FLAPS 2 к началу снижения и посадочную конфигурацию к высоте (alt) 1500 футов
– Переход на визуальный полет
– Отключение автопилота после разрешения посадки
Пилотирование с включенным автопилотом мы уже рассматривали выше. Поэтому остановимся на управлении вниманием для выполнения захода на посадку.
Для того, чтобы не иметь проблем при любом заходе на посадку, сразу после получения разрешения на заход (Approach clearance) нужно проверить 5 элементов. Для захода по ILS такими моментами являются:
– Activate Appr Phase
Запоминать более трех элементов не совсем правильно, поэтому разобьем все элементы на две группы. Первая группа (Activate Appr Phase + Sequence FPL) будет общей для всех типов инструментального захода. Оставшиеся три элемента для каждого типа инструментального захода будут различными. Раз мы уже коснулись других типов заходов, сведем весь контроль после получения разрешения на заход в таблицу, которая будет выглядеть следующим образом:

Некоторые из этих элементов могут быть выполнены значительно раньше (Activate Appr Phase), некоторые выполняются автоматически (Sequence FPL), но проверить их нужно сразу после получения разрешения на заход. Если после этой проверки мы выполняли какие-либо действия, то на FMA необходимо проверить вновь, что Appr по прежнему armed.
Далее, когда автоматика работает корректно, мы должны определить, как управлять вниманием на этом этапе. А для этого давайте решим, какие приоритеты должны быть в этот момент.
Самое главное при заходе на посадку это начать снижение по глиссаде в нужной точке, в нужной конфигурации, на нужной скорости. Чтобы всё это обеспечить необходимо строго следовать рекомендациям FCTM и указаниям СОП по рубежам начала выпуска механизации крыла, выдерживаемым скоростям, взаимодействию с ОВД и учёту метеоусловий (направление и сила ветра, турбулентность и т.п.).
Если говорить об особенностях, о которых не говорится в указанных источниках, то можно только отметить, что для обеспечения установленных условий стабилизации целесообразно на предпосадочном брифинге определить не только высоту стабилизации по QNH (Alt Stab), но и рубежи выпуска механизации и действия при нестабилизированном заходе. А главное, когда и по каким параметрам мы поймём, что заход стабилизировать не удастся. Особое внимание уделяем случаям, когда есть факторы, усложняющие своевременную стабилизацию самолёта. К таким факторам относятся:
– Более крутая глиссада;
– Низкий вход в глиссаду;
– Тренд роста скорости при снижении по глиссаде;
– Очень высокая температура;
Требования по выдерживанию повышенной (более 160 KT) скорости до OM или до 4 NM от торца ВПП.
Кроме того может оказать помощь в ситуции, когда есть факторы усложняющей стабилизацию, готовность выполнить посадку с неполностью выпущенной механизацией. Если мы как дополнительный вариант на предпосадочном брифинге рассмотрели возможность выполнить посадку и Conf 3 (посчитали посадочную дистанцию, определили использование реверса и другие особенности), то в условиях, когда ес ть дефицит времени для выпуска механизации в положение FULL можно принятть решение продолжить заход и выполнить посадку в Conf 3.
Когда самолёт проблем со своевременной стабилизацией уже нет, возникают следующие проблемы: переход на ручное пилотирование и переход на визуальное пилотирование. И то и другое является процедурой перехода, а это всегда самые ответственные моменты.
Поэтому первая рекомендация – не выполнять эти два действия одновременно, если ситуация позволяет это делать.
Выбор какое действие выполнять раньше какое позже зависит от конкретной обстановки и задачи. Чаще приходится сначала отключать автопилот (переходим на ручное управление), а затем переходим на визуальное пилотирование. И с методической точки зрения это проще.
Как отключается автопилот на ВС А320? Что может быть проще! Нажали красную кнопку на РУС и вот тебе ручное управление. И рули самолётом как хочешь. И получаются накладки. Директора сразу побежали, мы за директорами, а автомат тяги тягой начал сильнее шуровать, а значит создавать моменты, которые нужно компенсировать. А тут уже и на визуальное пилотирование нужно переходить. Проблемы словом.
Вторая проблема это переход на визуальное пилотирование. Эта проблема существовала всегда, но в последнее время с повышением надёжности автоматики современных ВС, когда пилот управляет самолётом визуально от 5-ти минут до 1-й минуты за полёт, проблема эта только увеличилась. Поэтому и важность обучения правильному переходу возрасла в разы.
Что самое главное для правильного перехода с инструментального пилотирования на визуальное? Всегда, когда мы хотим чему-то научить пилота, мы должны чётко представлять чему мы собираемся учить. Что есть процесс перехода? Это знание или навык? Ведь от того, что это зависит и принцип обучения.
Естественно, что процедура перехода на визуальное пилотирование это навык, но для того, чтобы убедить обучаемого пилота, что нужно делать именно так ка вы ему говорите он должен обладать знаниями. И первое, что он должен знать это, что означает, когда указатели траектории (FD’s) в центре. Заблуждением будет считать, что в этом случае самолёт находится на заданной траектории. FD’s в центре означает, что самолёт находится на заданной траектории или выходит на неё. Это важно для понимания, как правильно определить момент перехода на визуальное пилотирование. В целях обучения мы должны обеспечить наиболее благоприятные условия перехода ни визуальное пилотирование. Такими условиями является высота 600-700’ над превышением аэродрома и обязательное нахождение самолёта на заданной траектории в стабилизированном состоянии. Как определить высоту мы знаем. А вот как понять, что самолёт на заданной траектории и оттриммирован? Здесь нам поможет наличие указателей положения глиссады и нейтральное положение РУС. То есть если FD’s в центре, указатель курса (УК) и указатель глиссады (УГ) в центре и РУС в нейтральном положении, то можно переходить на визуальное пилотирование. Процедура перехода здесь немного сложнее чем отключения автопилота.
Теперь, когда мы знаем самый главный параметр для ухода на второй круг с очень малой высоты, поговорим о технике выполнения этого манёвра. Вернее об его отличиях от обычного ухода на второй круг.
Если всё же условия позволяют продолжить выполнение посадки, то на 50’ включается в работу режим Flare, что по замыслу конструкторов упрощает приземление самолёта, но, как и любая автоматика (а указанный режим это переход из автоматического управления по тангажу, в DiRECT LAW ) этот режим требует знания особенностей его работы. Автоматика запоминает текущее значение тангажа и с 30’ с темпом, обеспечивающим достижение тангажа -2 за 8 секунд от значения, которое было на 50’ уменьшает тангаж. Это объясняет отчасти, почему ниже 100’ ни в коем случает нельзя отдавать РУС от себя или ставить его нейтрально.
Это первое правило выполнения посадки на этапе выравнивания (flare) на А320:
РУС можно только брать на себя или фиксировать в текущем положении. Это вообще универсальное правило для пилотирования А320 – Не знаешь, что делать замри и ничего не делай.
Теперь непосредственно о процедуре приземления самолета. Приземлением будем считать этап от начала выравнивания до окончания опускания передней стойки (derotation). На важности и сложности этой процедуры не буду останавливаться.
Далее у нас остается две задачи: уменьшить вертикальную скорость до желаемой вертикальной скорости касания и поставить малый газ. С малым газом всё просто. Малый газ ставится тогда, когда пилот уверен, что необходимая скорость в момент приземления обеспечивается. В любом случае РУДы должны стоять в положении малого газа (idle) в момент касания основными стойками шасси полосы. Ещё один немаловажный триггер для установки малого газа это начало уменьшения вертикальной скорости. Если значительное уменьшение вертикальной скорости начинается с работающим автоматом тяги, то автомат тяги увеличит мощность двигателей для выдерживания заданной воздушной скорости, что увеличит воздушный участок и создаст кабрирующий момент. А это ещё и разбалансирует самолёт. Нужно будет компенсировать кабрирующий момент, а сразу же после того как всё же уменьшим тягу до малого газа, нужно будет компенсировать уже пикирующий момент. Всё это не прибавляет комфорта в непосредственной близости от земли. Но если мы попали в ситуацию, когда с началом выравнивания самолёта вертикальная скорость больше чем нам необходима, но не такая большая, что нужно уходить на второй круг, мы можем поставить РУДы в положение малого газа (idle) в момент касания полосы основными стойками шасси. Не позже!
Далее следует этап пробега, выполнение которого мало чем отличается от выполнения на других самолётах. Но, поскольку в наше время приходится учить пилотированию самолёта А320 пилотов, имеющих небольшой опыт пилотирования, стоит вспомнить, что для правильного выдерживания направления взгляд пилота должен быть на осевой линии ВПП максимально далеко от самолёта. Постоянное воздействие на педали в процессе пробега всегда есть следствие того, что взгляд пилота направлен на осевую в непосредственной близости от самолёта. И не стоит выходить на осевую как можно быстрее. Задача выдерживания направления на пробеге состоит в том, чтобы обеспечить такое движение самолёта, чтобы вектор скорости не был направлен за пределы ВПП.
Теперь поговорим об исправлениях ошибок на посадке.

Самые большие сложности на посадке вызывает высокое выравнивание или взмывание.
Обсудим причины, которые могут привести к высокому выравниванию. Основных причин несколько и их желательно знать для того чтобы воспользоваться главным универсальным правилом в исправлении ошибок при пилотировании самолёта: САМЫЙ ПРОСТОЙ СПОСОБ ИСПРАВЛЕНИЯ ОШИБКИ ПИЛОТИРОВАНИЯ - ИЗБЕЖАТЬ ЕЁ.
Избежать ошибки пилотирования позволяет в первую очередь знание причин этой ошибки. Причинами высокого выравнивания самолёта чаще всего являются:
- Повышенная (выше привычной) скорость в момент начала выравнивания. Обычное отклонение руля высоты создаёт больший кабрирующий момент со всеми вытекающими.
- Поздняя установка РУДов на режим малого газа. Если в момент начала выравнивания скорость заданная, то с началом искривления глиссады (а выравнивание и есть искривление траектории) скорость начинает падать (нам это и нужно), а АТ поддерживает заданную скорость. Это приведёт к увеличению кабрируещего момента вследствие того что вектор тяги двигателей находится ниже ЦТ самолёта. Те же последствия (даже немного хуже) будут и в случае плавной установки РУДов на режим МГ в процессе выравнивания.
- Эффект узкой полосы так же может привести к высокому выравниванию. Для того чтобы избежать этой проблемы необходимо разбирать особенности приземления на предпосадочном брифинге и использовать помощь аудио команд радиовысотомера.
- Раннее начало выравнивания из-за страха жесткого приземления на первоначальном этапе обучения или после жесткого приземления.
– уход на второй круг с высоты ниже 50 футов,
– забрать управление кнопкой Take Over PB и, удерживая эту кнопку, выполнить приземление, а также
– отключить автопилот на высоте ниже 200 футов и выполнить посадку в ручном режиме в реальном, не тренажёрном, полете.
Всё это позволит инструктору в реальном полете иметь возможность контролировать не только параметры полёта, но и поведение ученика. В этом случае нас интересуют глаза и руки обучаемого. Это позволит на раннем этапе определить возможное отклонение и установить причину ошибки для анализа и исправления. Техника исправления высокого выравнивания описана в методической литературе и сводится в основном к двум моментам:
– Исключить потерю скорости и увеличение тангажа
– Своевременно выявить невозможность безопасного приземления или выполнить прерванную посадку (Bulked Landing).
Если пилот-инструктор знает причину высокого выравнивания, то объяснить пилоту, что нужно делать, чтобы устранить эту ошибку труда не представит.
Следующая проблема на посадке это позднее выравнивание самолёта. Причинами позднего выравнивания могут быть:
– Стремление избежать перелёт, который стал очевиден ученику на высоте 100 футов (как правило, на ранней стадии обучения) и отдача РУС от себя.
– Особенности зрительного восприятия широкой посадочной полосы после посадки на узкую полосу.
– Сложности в визуальном определении высоты начала выравнивания:
– Темная полоса, особенно ночью
– Слепящий солнечный свет
– Отвлечение внимания от пилотирования (птица, звук etc.)
– Возврат РУС в нейтральное положение (отпускание) в процессе выравнивания. В основном на ранней стадии обучения.
– Высокое выравнивание самолёта в предыдущем полёте может привести к позднему выравниванию.
Исправление позднего выравнивания много сложнее чем высокого выравнивания вследствие дефицита времени. Опять же техника исправления непосредственно позднего выравнивания не относится к теме данной работы поскольку это уже обучение пилотированию инструктора. Но актуальность этой темы в свете того, что ушли в прошлое аэродромные тренировки пилотов перед получением первоначального допуска к инструкторской работе, заставляет остановиться на этой проблеме.

Естественно, что лучше научить стажёра избегать позднего выравнивания и не доводить ситуацию до прерывания посадки.
Так же серьёзной проблемой при выполнении приземления может быть ранняя установка РУДов на малый газ при перелёте. Это обучаемый может сделать неосознанно для предотвращения перелёта. Если перелёт значительный, то и уменьшение режима может быть очень ранней, что приведёт к потере скорости на большой высоте и, как следствие, к жёсткому приземлению. Здесь только один совет: При перелёте нужно быть к этому готовым, особенно при выполнении посадки с установкой обеспечить короткий пробег (короткая ВПП, попутный ветер, требование освободить полосу по определённой РД, etc.)
Если нам известны причины, ошибки, то её устранение это рутинная задача.
Для того чтобы избежать ошибки определения начала выравнивания по внешним факторам нужно обращать внимание на факторы, которые могут к этому привести перед каждым заходом на предпосадочном брифинге с выдачей рекомендаций по исключению ошибки.
Такими рекомендациями могут быть:
– уделять внимание RA Callouts. Имея такую установку, ученик при выполнении посадки будет настроен контролировать свою визуальную оценку высоты начала выравнивания аудио информацией от радиовысотомера.
– Правильно переносить взгляд в момент начала выравнивания.
– Учитывать условия ухудшающие визуальное определение высоты самолёта при приземлении.
Для того чтобы не возникали проблемы позднего выравнивания (невыравнивания) инструктор должен быть готов к тому, что такая проблема может иметь место. То есть на этапе выравнивания инструктор постоянно мониторит поведение стажёра по алгоритму:
Для того чтобы воспользоваться предыдущей рекомендацией инструктор должен иметь навык пилотирования с зажатой кнопкой отключения автопилота.
Если в процессе выравнивания самолёта возникает крен, то чаще всего это неправильная регулировка подлокотника. В этом случае стоит вернуться к правильной регулировке кресла.
Внимание: Регулировка кресла на ВС А320 электрическая. Это более надёжная регулировка, чем механическая, но необходимо помнить, что на критических этапах полета пилотирующему пилоту категорически запрещается выполнять регулировку кресла. Потому что замыкание переключателя регулировки кресла приведёт к его неконтролируемому перемещению. А на этапах взлёта и посадки более чем опасно.
ЗАКЛЮЧЕНИЕ
В настоящей работе автор старался обсудить моменты, которые не описаны или недостаточно описаны в различных методических пособиях и руководствах. Выбор тем для обсуждения носит абсолютно субъективный характер.
Категории метеоминимумов ИКАО
для точных заходов на посадку и посадок самолетов
Для упрощения формулировок требований к оборудованию самолетов и аэродромов ИКАО определила категории минимумов при инструментальном заходе на посадку и посадке
(Doc 9365. Руководство по всепогодным полетам)
В каждом конкретном случае метеоминимум для посадки определяется исходя из минимумов аэродрома, воздушного судна, командира воздушного судна, по наивысшему из них.
Категория I (Кат. I) — допускается точный заход на посадку и посадка по приборам с высотой принятия решения (DH) не ниже 60 м (200 футов) над ВПП, а также при метеорологической дальности видимости не менее 800 м (2400 футов) или дальности видимости на ВПП (RVR) в зоне приземления не менее 550 м. Самолет, оборудованный в соответствии с I категорией, должен обеспечивать полуавтоматическое снижение до высоты 60 м (200 футов).
Категория II (Кат. II) — допускается точный заход на посадку и посадка по приборам с высотой принятия решения (DH) менее 60 м (200 футов) над ВПП, но не ниже 30 м (100 футов) и при дальности видимости на ВПП (RVR) не менее 350 м (1200 футов). Самолет, оборудованный в соответствии со II категорией, должен обеспечивать автоматическое снижение до высоты предпосадочного выравнивания.
Категория IIIA (Кат. IIIA) — допускается точный заход на посадку и посадка по приборам с высотой принятия решения (DH) менее 30 м (100 футов) над ВПП или без ограничения по высоте принятия решения и при дальности видимости на ВПП (RVR) не менее 200 м (700 футов). Самолет, оборудованный в соответствии с категорией IIIA, должен обеспечивать автоматическое снижение и предпосадочное выравнивание.
Категория IIIB (Кат. IIIB) — допускается точный заход на посадку и посадка по приборам с высотой принятия решения (DH) менее 15 м (50 футов) над ВПП или без ограничения по высоте принятия решения и при дальности видимости на ВПП (RVR) менее 200 м (700 футов), но не менее 50 м (150 футов). Самолет, оборудованный в соответствии с категорией IIIB, должен обеспечивать автоматическое снижение, предпосадочное выравнивание и посадку.
Читайте также: