
Белогородский автоматизация управления посадкой самолета
Добавил пользователь Дмитрий К. Обновлено: 19.09.2024
Проблемы предпосадочного маневрирования и, в частности, вопросы определения диапазона допустимых боковых отклонений рассматривались в ряде работ зарубежных и отечественных авторов[35]. Ниже будут использованы результаты и выводы исследований, выполненных в ГосНИИ ГА[36].
В общем случае в момент перехода на визуальный полет самолет может иметь как линейное, так и угловое отклонение от посадочной траектории. Основными источниками линейных боковых отклонений самолета от посадочной траектории являются етатизм систем полуавтоматического и автоматического управления, а также отклонения курсовой ЛИНИИ КРМ от оси ВПП. Боковые отклонения могут быть следствием траекторных колебаний самолета относительно курсовой линии. Угловые отклонения (отклонения вектора путевой скорости самолета от направления посадки) в основном являются следствием траекторных колебаний самолета и неточного подбора угла сноса.
Из гл. 3 известно, что к современным системам траєкторного управления предъявляются требования траекторной устойчивости и автоматического учета сноса. Поэтому практически величины угловых отклонений самолета в момент перехода на визуальный полет невелики и их имеет смысл учитывать лишь при небольших дальностях от ВПП.
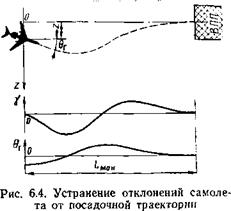
Очевидно, худшим сочетанием бокового и углового отклонений является такое, при котором самолет вследствие углового отклонения 0Г уходит от посадочной траектории, увеличивая уже имеющееся боковое отклонение z (рис. 6.4). Для устранения этих отклонений необходимо развернуть самолет вначале в одну, а затем в другую сторону. При этом траектория движения самолета имеет вид деформированной латинской буквы S, вследствие чего корректирующий маневр часто называют S-образным маневром.
При расчете допустимых отклонений самолета от посадочной траектории будем исходить из следующих предпосылок.
Боковое маневрирование происходит в процессе снижения самолета по заданной глиссаде. Маневрирование должно быть в основном закончено к моменту пролета порога ВПП (высота пролета порога ~ 10 м).
Принимая, что, во-первых, базовая точка сдотемы СП-50 и ИЛС находится на высоте 15 м и, во-вторых, превышение антенны ГРП над нижним краем шасси составляет около 5 му легко определить, что при таких условиях самолет проходит над порогом ВПП на высоте около 10 м.
В точке окончания бокового маневра по возможности не должно быть угловых отклонений вектора путевой скорости от направления посадки (при расчете их полагают равными нулю). При приземлении на ВПП могут быть допущены некоторые линейные боковые отклонения Az0 самолета от ее оси, величина которых зависит от ширины ВПП. Поэтому для определения допустимых боковых отклонений в точке перехода на визуальный полет эти допустимые отклонения Az0 необходимо суммировать с отклонениями, которые могут быть исправлены при маневрировании.
Ввиду близости к земле обычно вводят ограничения на величину максимального крена самолета при выполнении корректирующего маневра. Для большинства реактивных самолетов можно полагать, что на высотах Я>45^-50 м максимальный крен при маневре не должен превышать ymax^lS0, а на меньших высотах величина максимально допустимого крена уменьшается с высотой
примерно по линейному закону 7тах ~ — (у, град; Я, м).
На выполнение корректирующего маневра определенное влияние оказывают некоторые ограничения в части управляемости: максимально допустимый угол отклонения штурвала фшт. шах^ЭО0; максимальное усилие, прикладываемое к штурвалу Лш. тах=25 КГ максимальное усилие, прикладываемое к педалям Рр^=60 кГ.
Наибольшую роль эти ограничения играют при малых дистанциях маневрирования, так как ввиду кратковременности маневрирования самолет не успевает достичь предельно допустимых значений крена.
tglf* __ sin9r 2 2V2 2
где 0г — угол между направлением вектора путевой скорости самолета правлением посадки, град;
Аман — дистанция маневрирования, м;
Azq —- допустимое линейное боковое отклонение самолета от оси ВПП мент приземления, м; у* — средний крен при маневрировании.
Ориентировочное значение допустимого бокового отклонения в точке перехода на визуальный полет может быть определено из следующей зависимости:
Выполнив расчет для ряда значений LMан и 0г> можно построить графики допустимых боковых отклонений для данного типа самолета (рис. 6.5):
^тах доп f ман> ®г)*
Опыт эксплуатации показывает, что при автоматизированном управлении заходом на посадку отклонения вектора путевой скорости от направления посадки находятся в пределах 0Г=±2~3°. С учетом этого будем считать, что допустимые боковые отклонения отражаются графиком функции Zmax доп — f (^маш 6г— 2 ).
Построив этот график и симметричный ему график
выделим область (рис. 6.6) допустимых отклонений самолета. В соответствии с принятыми ранее условиями будем считать заходы на посадку ус- I пешными, если самолет при пе — j реходе на визуальный полет | находится внутри этой об-’ ласти.
Заметим, что диапазон до пуетимых боковых отклонений более точно определяется графо-аналитическим методом, по — Рис. 6.6. Область допустимых боковых зволяющим учесть ограниче — отклонений самолета
ко и в этом случае можно получить лишь приблизительные значения допустимых боковых отклонений, которые требуют уточнения в летных испытаниях. Такие испытания включают полеты в различных условиях, в том числе ночью, при боковых ветрах и т. д.
Вместе с тем зависимость (6.3) позволяет достаточно полно оценить значимость различных факторов, влияющих на диапазон допустимых боковых отклонений. Весьма значительное влияние на него оказывает скорость полета (рис. 6.7). Самолеты выпуска по
следних лет имеют скорости захода на посадку значительно меньшие, чем самолеты аналогичных типов, разработанные ранее. Достигается это в основном за счет применения всевозможных средств механизации крыла.
До сих пор мы полагали, что корректирующие маневры выполняются координированно. При этом боковая сила создается за счет крена, который ограничивается по соображениям безопасности. Поэтому оказываются ограниченными величина боковой силы и диапазон допустимых боковых отклонений. При сохранении ограничений по крену диапазон таких отклонений может быть расширен, если корректирующие маневры выполнять с внешним скольжением, создающим дополнительную боковую силу. С этой точки зрения применение внешнего скольжения эквивалентно увеличению среднего крена. Некоординированный разворот с креном у и боковой перегрузкой пг происходит с такой же угловой скоростью, что и координированный разворот с креном
Особенно эффективно применение внешнего скольжения в тех случаях, когда допустимы лишь небольшие крены К Однако выполнение маневров со скольжением более трудно, чем координированных. Поэтому некоординированные маневры имеют ограниченное применение.
Этим уменьшается инерционное запаздывание в образовании крена, что способствует увеличению среднего крена при выполнении корректирующих маневров, а значит, приводит к расширению области допустимых боковых отклонений самолета.
1 Подробно об использовании скольжения при предпосадочном маневрировании см. Белогородский С. Л. О некоторых вопросах предпосадочного маневрирования. ОНТИ ГосНИИ ГВФ, 1964. с. 35.
Прошу многоуважаемый олл натолкнуть меня на литературу (желательно доступную для скачивания) по теории автоматического управления полетом летательных аппаратов. Т.е. приветствуется любая толковая литература по построению автопилотов от классических до каких-нибудь адаптивных.
Хочется самому реализовать в коде.
Здравствуйте, Димчанский, Вы писали:
Д>Прошу многоуважаемый олл натолкнуть меня на литературу (желательно доступную для скачивания) по теории автоматического управления полетом летательных аппаратов. Т.е. приветствуется любая толковая литература по построению автопилотов от классических до каких-нибудь адаптивных.
Д>Хочется самому реализовать в коде.
Д>Спасибо заранее.
Спасибо. Но там очень скудно как-то. Т.е. из разряда: автопилот для домохозяек. Хотелось бы из разряда: автопилот для математиков.
В момент включения системы автоматического управления заходом на посадку (СУ ЗП) самолет может иметь отклонение от оси ВПП (см. рис.5.11) DZ, и направление полета может не совпадать с осью ВПП.
 |

где: (5.6)
yВ – угол сноса от бокового ветра, а соотношение (5.6) записано в предположении, что угол скольжения b непрерывно устраняется РН. Из рис. 5.11 находим соотношения, связывающие боковое линейное смещение DZ и угол eк, определяемый курсовым радиоприемником
; (5.7)
где Vп - путевая скорость.
"Замораживая" расстояние L , находим ПФ:

(5.8)
Для приведения самолета на ось ВПП СУ ЗП формирует сигнал управления в виде заданного угла крена gзад, в результате самолет накреняется и разворачивается в сторону оси ВПП. СУ ЗП строится на базе СУ стабилизации бокового смещения (см. п. 4.2.1.). Возможны два варианта построения.
1. СУ с форсирующим корректирующим звеном

(5.9)
где t, Т – постоянные времени форсирующего звена, причем t > T,

(5.10)

В этой системе производная в закон формирования заданного угла крена вводится путем реального дифференцирования сигнала курсового радиоприемника. Структурная схема СУ ЗП имеет вид:
2. СУ с обратной связью (ОС) по углу рыскания.
В этом случае производная по eк в законе формирования заданного значения угла крена получается путем создания ОС по углу рыскания, отсчитываемому относительно оси ВПП.
Структурная схема СУ ЗП имеет вид:

Из структурной схемы получаем соотношение

. (5.11)

(5.12)
системы (см. п. 4.2.1) находим:

(5.13)
Подставляя (5.13) в (5.11) получим соотношение:

(5.14)
из которого видно, что введение ОС по курсу эквивалентно дифференцированию сигнала eк.
Так же, как и в продольном движении, угловая ошибка eк, соответствующая одному и тому же линейному смещению DZ по мере приближения к КРМ, увеличивается. Система становится чрезмерно чувствительной к боковой ошибке (коэффициент усиления сильно возрастает). Для устранения этого явления прибегают к регулированию коэффициента усиления СУ в функции высоты.

Недостатком СУ ЗП, изображенной на рис.5.13, является наличие бокового смещения относительно оси ВПП при боковом ветре. Это следует из анализа ПФ (для ):


(5.15)
Для устранения статической ошибки Deуст необходимо вводить дополнительно сигнал по интегралу от eк.
Учебная и методическая литература по разделу 2
1. Мосолов В.Е., Харитонов В.Н. Системы автоматического управления угловым движением ЛА.-М.: МАИ, 1995.
2. Михалев И.А., Окоемов Б.Н., Чикулаев М.С. Системы автоматического управления самолетом. – М.: Машиностроение, 1987.
3. Гуськов Ю.П., Загайнов Г.И, Управление полетом самолетов. – М.: Машиностроение, 1980.
4. Белогородский С.Л. Автоматизация управления посадкой самолета. М.:Транспорт, 1972. - 352 с



Реферат патента 1992 года Устройство для формирования сигнала управления летательным аппаратом при заходе на посадку

Изобретение относится к управлению летательными аппаратами, в частности к устройствам, обеспечивающим заход на посадку по глиссаде на аэродром без начального радиотехнического оборудования, Целью изобретения является повышение безопасности полета. Сущность изобретения сводится к учету при формировании управляющего сигнала зоны предельно допустимых отклонений от линии глиссады. Для этого блок 4 определения контрольных высот и времени полета на основе сигналов измерителя 1 дальности и заданного угла наклона глиссады формирует сигналы требуемых высот Н0 и Нн соответственно для полета по глиссаде и по линии нижнего предельного отклонения от глиссады. Затем в блоке 5 формирования управляющего сигнала вертикальной скорости на основе сигналов Н0, Нн. времени полета и фактического значения высоты полета определяются вертикальная скорость Vy0 для полета по глиссаде, вертикальная скорость Уун для полета по линии нижнего продольного отклонения,вертикальная скорость Vyp необходимая для полета от фактического положения летательного аппарата к торцу взлетно-посадочной полосы, и формируется управляющий сигнал VyK по скорости для выхода на линию глиссады по зависимости (Vyp - Vyn)/(Vyo - VyH). 3 ил. fe
Формула изобретения SU 1 720 933 A1
J/W«/cJ
Читайте также: